 Pompe piscine à vitesse variable Noxplus de Espa+ Excellent rapport qualité / prix + Très bonne qualité de filtration + Économies garanties + 3 ans de garantieCaractéristiques techniques Corps de pompe, flasques d'aspiration et de refoulement, turbine et diffuseur: TechnopolymèreAxe moteur: Inox AISI 431Garniture mécanique: Graphite/alumineCarcasse moteur: AluminiumJoints: NBR/EPDMIsolement du moteur: Classe FProtection du moteur: IPX 5T° maxi du liquide: 40°CProtection thermique incorporée: OuiService continu: Oui La pompe Noxplus est livrée avec : - 2 mètre de câble électrique avec prise moulée type F- Des raccords union Ø 50 mm Bon à savoir : La fabrication de la Noxplus repose sur la base d'une Nox 100-18 M, elle peut donc s'installer en lieu et place des NOX 75-15, 100-18 et 150-22, de toute la gamme de pompes Silen et des Silen SI 15 et 18.
Pompe piscine à vitesse variable Noxplus de Espa+ Excellent rapport qualité / prix + Très bonne qualité de filtration + Économies garanties + 3 ans de garantieCaractéristiques techniques Corps de pompe, flasques d'aspiration et de refoulement, turbine et diffuseur: TechnopolymèreAxe moteur: Inox AISI 431Garniture mécanique: Graphite/alumineCarcasse moteur: AluminiumJoints: NBR/EPDMIsolement du moteur: Classe FProtection du moteur: IPX 5T° maxi du liquide: 40°CProtection thermique incorporée: OuiService continu: Oui La pompe Noxplus est livrée avec : - 2 mètre de câble électrique avec prise moulée type F- Des raccords union Ø 50 mm Bon à savoir : La fabrication de la Noxplus repose sur la base d'une Nox 100-18 M, elle peut donc s'installer en lieu et place des NOX 75-15, 100-18 et 150-22, de toute la gamme de pompes Silen et des Silen SI 15 et 18. SwimExpert Pompe piscine 2 cv - 20,5 m3/h Monophasée<p>Pompe de filtration piscine SwimExpert 2 cv monophasée :</p> <ul> <li>Meilleur rapport Qualité/Prix sélectionné par MyPiscine</li> <li>Puissance : 2 cv</li> <li>Débit à 1 bar : 20,5 m3/h</li> <li>Alimentation : Monophasée 230 V</li> <li>Fonctionnement silencieux</li> <li>Auto amorçante</li> <li>Compatible eau chlorée et eau salée</li> <li>Raccord union fournis Ø50 mm intérieur </li> </ul>
SwimExpert Pompe piscine 2 cv - 20,5 m3/h Monophasée<p>Pompe de filtration piscine SwimExpert 2 cv monophasée :</p> <ul> <li>Meilleur rapport Qualité/Prix sélectionné par MyPiscine</li> <li>Puissance : 2 cv</li> <li>Débit à 1 bar : 20,5 m3/h</li> <li>Alimentation : Monophasée 230 V</li> <li>Fonctionnement silencieux</li> <li>Auto amorçante</li> <li>Compatible eau chlorée et eau salée</li> <li>Raccord union fournis Ø50 mm intérieur </li> </ul> ACIS Pompe piscine SOLUBLOC 0.4 KW compatible bloc Desjoyaux P18Voici notre collection de pompe piscine compatible avec les blocs filtrants de marque DESJOYAUX. La solubloc vous permet de remplacer en lieu et place votre pompe sans difficulté et sans plomberie sur les blocs P-18 et P-25 après 1995. Malgré son prix agressif, la solubloc est une pompe de qualité : moteur résiste à des T°C jusqu'à + 65 ° C et une garantie de 5 ans sur le moteur. Nous faisons aussi la version chinoise avec la pompe BTP 400 compatible aussi avec les blocs desjoyaux P18 après 1995. - Pompe piscine BTP 400 : Compatible bloc Desjoyaux P 18 En plus de la version SOLUBLOC, Distripool vous propose la version chinoise de la pompe pour Bloc P18. Malgré son origine, c'est une pompe de bonne qualité qui fonctionne très bien. Cependant nous faisons une garantie de 1 an sur le produit. Pompe piscine SOLUBLOC compatible bloc Desjoyaux Référence Raccord Puissance Desjoyaux bloc A P18_SOLUBLOC 50 mm 0.4 KW P 18 2 P25_SOLUBLOC 63 mm 0.1 KW P 25 5 SOLUBLOC - - - - Comment contrôler que la pompe est bien compatible avec ma Desjoyaux ? REFOULEMENT A DROITE (vert) Quand on regarde la pompe par l’arrière, la sortie du refoulement doit se trouver sur la droite . REFOULEMENT A GAUCHE (rouge) Quand on regarde la pompe par l’arrière, si la sortie du refoulement se trouve sur la gauche, les pompes PHT/SOLUBLOC ne peuvent pas se mettre en remplacement. Dimensions pompe SOLUBLOC et BTP 400 pour Bloc P-18 Dimensions pompe SOLUBLOC P-25 Dimensions pompe SOLUBLOC BI VITESSE : 2 CV IMPORTANT La marque DESJOYAUX appartient à un tiers. Elle est employée uniquement pour informer le client professionnel sur la compatibilité de la pompe SOLUBLOC avec cette marque et son produit "bloc Desjoyaux". En aucun cas son usage n'a pour objet de suggérer que les produits décrits seraient identiques aux produits et installations commercialisés sous la marque citée, ou qu'il existerait un lien entre ACIS - le fabricant de la pompe SOLUBLOC, et le titulaire de cette marque . En tant que fabricant de pompes, ACIS garantit qu'un remplacement fait conformément aux règles de montage fournies, n'affecte en rien les performances antérieures.
ACIS Pompe piscine SOLUBLOC 0.4 KW compatible bloc Desjoyaux P18Voici notre collection de pompe piscine compatible avec les blocs filtrants de marque DESJOYAUX. La solubloc vous permet de remplacer en lieu et place votre pompe sans difficulté et sans plomberie sur les blocs P-18 et P-25 après 1995. Malgré son prix agressif, la solubloc est une pompe de qualité : moteur résiste à des T°C jusqu'à + 65 ° C et une garantie de 5 ans sur le moteur. Nous faisons aussi la version chinoise avec la pompe BTP 400 compatible aussi avec les blocs desjoyaux P18 après 1995. - Pompe piscine BTP 400 : Compatible bloc Desjoyaux P 18 En plus de la version SOLUBLOC, Distripool vous propose la version chinoise de la pompe pour Bloc P18. Malgré son origine, c'est une pompe de bonne qualité qui fonctionne très bien. Cependant nous faisons une garantie de 1 an sur le produit. Pompe piscine SOLUBLOC compatible bloc Desjoyaux Référence Raccord Puissance Desjoyaux bloc A P18_SOLUBLOC 50 mm 0.4 KW P 18 2 P25_SOLUBLOC 63 mm 0.1 KW P 25 5 SOLUBLOC - - - - Comment contrôler que la pompe est bien compatible avec ma Desjoyaux ? REFOULEMENT A DROITE (vert) Quand on regarde la pompe par l’arrière, la sortie du refoulement doit se trouver sur la droite . REFOULEMENT A GAUCHE (rouge) Quand on regarde la pompe par l’arrière, si la sortie du refoulement se trouve sur la gauche, les pompes PHT/SOLUBLOC ne peuvent pas se mettre en remplacement. Dimensions pompe SOLUBLOC et BTP 400 pour Bloc P-18 Dimensions pompe SOLUBLOC P-25 Dimensions pompe SOLUBLOC BI VITESSE : 2 CV IMPORTANT La marque DESJOYAUX appartient à un tiers. Elle est employée uniquement pour informer le client professionnel sur la compatibilité de la pompe SOLUBLOC avec cette marque et son produit "bloc Desjoyaux". En aucun cas son usage n'a pour objet de suggérer que les produits décrits seraient identiques aux produits et installations commercialisés sous la marque citée, ou qu'il existerait un lien entre ACIS - le fabricant de la pompe SOLUBLOC, et le titulaire de cette marque . En tant que fabricant de pompes, ACIS garantit qu'un remplacement fait conformément aux règles de montage fournies, n'affecte en rien les performances antérieures.
 Moover : Moteur pour abri de piscine jusqu'a abri - BMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au bon endroit. Grâce à la conception unique, vous pouvez installer le MOOVER sur des abris neufs ou existants de la société ALBIXON ainsi que d’autres marques. Il n'est pas possible d'installer le Moover sur : les abri sans rails, Avec angle négatifou plus lourd que 750 kilos - Moteur pour abri de piscine MOOVER - ALBIXON Un design élégant et une autonomie remarquabl Le design du Moover est pensé pour s’intégrer facilement dans vos extérieurs. Il est discret et prend très peu de place afin de préserver l’espace autour du bassin. De plus, Moover est doté de panneaux solaires qui lui permettent de fonctionner durant toute la saison estivale soit 3 mois. Grâce à sa batterie haute capacité dernière technologie, il peut fonctionner 1,5 heures en continu et jusqu’à 800 heures en mode veille. Une révolution dans l’utilisation de votre abri de piscine Développé en collaboration avec des ingénieurs de l’automobile, Moover vous permet de faire bouger votre abri de piscine sans effort . Son secret réside dans sa roue motorisée située à l’intérieur du boîtier. Il vous suffit d’appuyer sur un bouton pour ensuite piquer une tête, Moover vous fait gagner du temps et économiser vos efforts. Et quand vous ne souhaitez pas activer l'assistance de Moover, il vous suffit de dévisser l’écrou papillon afin de relâcher la pression de la roue. Grâce à la télécommande avec une portée de 30 mètres, vous pouvez facilement contrôler l’ouverture et la fermeture de votre abri de piscine. Et elle est si simple d’utilisation que tous les membres de la famille peuvent l’utiliser. Motoriser votre abri de piscine devient un jeu d’enfant : Moover est livré avec une notice de montage très bien détaillée qui vous permet de monter facilement le système d’ouverture et de fermeture de l’abri de piscine. Vous pouvez le faire seul, cela ne vous prendra que quelques heures. Et n’oubliez pas que les experts de Distripool sont à votre disposition pour vous aider à installer votre Moover. Moover s'adapte sur tous les abris de piscine dont le pas des arcs est de 1063 mm et le plan latéral ne présente pas d'angle d'incidence négatif. . Fiche technique : Moteur MOOVER pour abri de piscine Photo du MOOVER ALBIXON
Moover : Moteur pour abri de piscine jusqu'a abri - BMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au bon endroit. Grâce à la conception unique, vous pouvez installer le MOOVER sur des abris neufs ou existants de la société ALBIXON ainsi que d’autres marques. Il n'est pas possible d'installer le Moover sur : les abri sans rails, Avec angle négatifou plus lourd que 750 kilos - Moteur pour abri de piscine MOOVER - ALBIXON Un design élégant et une autonomie remarquabl Le design du Moover est pensé pour s’intégrer facilement dans vos extérieurs. Il est discret et prend très peu de place afin de préserver l’espace autour du bassin. De plus, Moover est doté de panneaux solaires qui lui permettent de fonctionner durant toute la saison estivale soit 3 mois. Grâce à sa batterie haute capacité dernière technologie, il peut fonctionner 1,5 heures en continu et jusqu’à 800 heures en mode veille. Une révolution dans l’utilisation de votre abri de piscine Développé en collaboration avec des ingénieurs de l’automobile, Moover vous permet de faire bouger votre abri de piscine sans effort . Son secret réside dans sa roue motorisée située à l’intérieur du boîtier. Il vous suffit d’appuyer sur un bouton pour ensuite piquer une tête, Moover vous fait gagner du temps et économiser vos efforts. Et quand vous ne souhaitez pas activer l'assistance de Moover, il vous suffit de dévisser l’écrou papillon afin de relâcher la pression de la roue. Grâce à la télécommande avec une portée de 30 mètres, vous pouvez facilement contrôler l’ouverture et la fermeture de votre abri de piscine. Et elle est si simple d’utilisation que tous les membres de la famille peuvent l’utiliser. Motoriser votre abri de piscine devient un jeu d’enfant : Moover est livré avec une notice de montage très bien détaillée qui vous permet de monter facilement le système d’ouverture et de fermeture de l’abri de piscine. Vous pouvez le faire seul, cela ne vous prendra que quelques heures. Et n’oubliez pas que les experts de Distripool sont à votre disposition pour vous aider à installer votre Moover. Moover s'adapte sur tous les abris de piscine dont le pas des arcs est de 1063 mm et le plan latéral ne présente pas d'angle d'incidence négatif. . Fiche technique : Moteur MOOVER pour abri de piscine Photo du MOOVER ALBIXON- Moover : Moteur pour abri de piscine jusqu'a abri - AMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au
 Zodiac Bloc moteur Vortex 3 type A<p>Bloc moteur pour robot de piscine Zodiac Vortex type A. Compatibles avec mes modèles Vortex 2, Vortex 3, Vortex 3.2, Vortex RV4200, Vortex RV4400, Vortex OV3300, Vortex OV3400, Vortex OV3480.</p> <p>Référence R0637800, remplace les anciennes références W2123C et W1895C.</p>
Zodiac Bloc moteur Vortex 3 type A<p>Bloc moteur pour robot de piscine Zodiac Vortex type A. Compatibles avec mes modèles Vortex 2, Vortex 3, Vortex 3.2, Vortex RV4200, Vortex RV4400, Vortex OV3300, Vortex OV3400, Vortex OV3480.</p> <p>Référence R0637800, remplace les anciennes références W2123C et W1895C.</p> N°22 - Bloc moteur robot Dolphin S100Bloc moteur pour le robot Dolphin S100 performant. Numéro 22 sur l'image
N°22 - Bloc moteur robot Dolphin S100Bloc moteur pour le robot Dolphin S100 performant. Numéro 22 sur l'image Robot de piscine Bestway Ruby Tri-moteursRobot piscine Bestway Ruby Tri-moteurs - Technologie sans fil Nettoyage optimisé du fond et des parois jusqu’à la ligne d’eau Ruby est un petit joyau dans l’univers des robots électriques pour piscines : il allie les avantages de la technologie sans fil à l’aisance de déplacement des robots électriques équipés de 3 moteurs. Fini les càbles emmêlés ou trop courts pour aller nettoyer correctement les angles de la piscine, le robot Bestway Ruby a toute la liberté nécessaire pour se déplacer partout à l’intérieur de votre piscine et il a la puissance nécessaire pour remonter les parois pour y aspirer les saletés qui s’y déposent. La puissance de ses 3 moteurs lui permet de se déplacer et monter aux parois sans affaiblir la puissance d’aspiration et donc conserver une qualité de filtration constante au cours de son cycle de nettoyage de 90 minutes. La batterie qui équipe le robot Ruby lui permet d’avoir la puissance nécessaire pour effectuer un nettoyage d’entretien complet en 90 minutes, elle pourra être rechargée en 7 à 8 heures une fois le robot sec et connecté à une source d’alimentation. Son poids plume lui permet d’être mis à l’eau et ressorti très facilement sans effort conséquent pour que le nettoyage de la piscine ne soit plus une contrainte. Le capteur d’eau qu’il embarque lui permet de démarrer automatiquement lorsque vous le plongez dans l’eau et commencer ainsi son travail de nettoyage. Les cassettes filtrantes qui équipent ce modèle Ruby ont une capacité importante pour lui permettre d’aller au bout de son cycle de nettoyage sans arrêt prématuré pour motif de filtre plein, et elles ont une capacité de filtration de 180 microns qui est particulièrement adaptée aux piscines où l’on retrouves des débris végétaux, morceaux de feuilles, terre, etc... Ruby détectera automatiquement sa sortie de l’eau gràce à ce même capteur et se coupera donc pour préserver totalement son moteur. Qualité de conception et de fabrication Bestway Gràce à son savoir-faire, Bestway propose aujourd’hui le modèle Ruby, un robot autonome qui vous libère des contraintes des càbles et permet un nettoyage efficace du fond à la ligne d’eau, adapté à tout type de piscine. La batterie Lithium-ion permet de conserver des performances constantes tout au long du cycle de nettoyage. C’est un élément technique important trop souvent négligé et qui sera pourtant déterminant pour une durée de vie optimale. Ruby n’est retenu par aucun càble, cela lui permet d’avoir une amplitude maximale pour ses déplacements. Plus petit et plus léger qu’un robot électrique classique, il sera plus facile à manipuler et vous facilitera grandement l’entretien de votre piscine. Pour quelles piscines ? Tout type de piscines hors-sol ou enterrées jusqu’à 8 x 4m Tout type de formes Fond plat et pentes composées jusqu’à 30° Tout revêtement (liner, carrelage, béton peint, coque, etc...) Informations complémentaires Batterie rechargeable : Lithium-ion 8800 mAh Autonomie de la batterie : 1h30 (soit 90...
Robot de piscine Bestway Ruby Tri-moteursRobot piscine Bestway Ruby Tri-moteurs - Technologie sans fil Nettoyage optimisé du fond et des parois jusqu’à la ligne d’eau Ruby est un petit joyau dans l’univers des robots électriques pour piscines : il allie les avantages de la technologie sans fil à l’aisance de déplacement des robots électriques équipés de 3 moteurs. Fini les càbles emmêlés ou trop courts pour aller nettoyer correctement les angles de la piscine, le robot Bestway Ruby a toute la liberté nécessaire pour se déplacer partout à l’intérieur de votre piscine et il a la puissance nécessaire pour remonter les parois pour y aspirer les saletés qui s’y déposent. La puissance de ses 3 moteurs lui permet de se déplacer et monter aux parois sans affaiblir la puissance d’aspiration et donc conserver une qualité de filtration constante au cours de son cycle de nettoyage de 90 minutes. La batterie qui équipe le robot Ruby lui permet d’avoir la puissance nécessaire pour effectuer un nettoyage d’entretien complet en 90 minutes, elle pourra être rechargée en 7 à 8 heures une fois le robot sec et connecté à une source d’alimentation. Son poids plume lui permet d’être mis à l’eau et ressorti très facilement sans effort conséquent pour que le nettoyage de la piscine ne soit plus une contrainte. Le capteur d’eau qu’il embarque lui permet de démarrer automatiquement lorsque vous le plongez dans l’eau et commencer ainsi son travail de nettoyage. Les cassettes filtrantes qui équipent ce modèle Ruby ont une capacité importante pour lui permettre d’aller au bout de son cycle de nettoyage sans arrêt prématuré pour motif de filtre plein, et elles ont une capacité de filtration de 180 microns qui est particulièrement adaptée aux piscines où l’on retrouves des débris végétaux, morceaux de feuilles, terre, etc... Ruby détectera automatiquement sa sortie de l’eau gràce à ce même capteur et se coupera donc pour préserver totalement son moteur. Qualité de conception et de fabrication Bestway Gràce à son savoir-faire, Bestway propose aujourd’hui le modèle Ruby, un robot autonome qui vous libère des contraintes des càbles et permet un nettoyage efficace du fond à la ligne d’eau, adapté à tout type de piscine. La batterie Lithium-ion permet de conserver des performances constantes tout au long du cycle de nettoyage. C’est un élément technique important trop souvent négligé et qui sera pourtant déterminant pour une durée de vie optimale. Ruby n’est retenu par aucun càble, cela lui permet d’avoir une amplitude maximale pour ses déplacements. Plus petit et plus léger qu’un robot électrique classique, il sera plus facile à manipuler et vous facilitera grandement l’entretien de votre piscine. Pour quelles piscines ? Tout type de piscines hors-sol ou enterrées jusqu’à 8 x 4m Tout type de formes Fond plat et pentes composées jusqu’à 30° Tout revêtement (liner, carrelage, béton peint, coque, etc...) Informations complémentaires Batterie rechargeable : Lithium-ion 8800 mAh Autonomie de la batterie : 1h30 (soit 90...- Robot de piscine Bestway Ruby Tri-moteursRobot piscine Bestway Ruby Tri-moteurs - Technologie sans fil Nettoyage optimisé du fond et des parois jusqu’à la ligne d’eau Ruby est un petit joyau dans l’univers des robots électriques pour piscines : il allie les avantages de la technologie sans fil à l’aisance de déplacement des robots électriques équipés de 3 moteurs. Fini les càbles emmêlés ou trop courts pour aller nettoyer correctement les angles de la piscine, le robot Bestway Ruby a toute la liberté nécessaire pour se déplacer partout à l’intérieur de votre piscine et il a la puissance nécessaire pour remonter les parois pour y aspirer les saletés qui s’y déposent. La puissance de ses 3 moteurs lui permet de se déplacer et monter aux parois sans affaiblir la puissance d’aspiration et donc conserver une qualité de filtration constante au cours de son cycle de nettoyage de 90 minutes. La batterie qui équipe le robot Ruby lui permet d’avoir la puissance nécessaire pour effectuer un nettoyage d’entretien complet en 90 minutes, elle pourra être rechargée en 7 à 8 heures une fois le robot sec et connecté à une source d’alimentation. Son poids plume lui permet d’être mis à l’eau et ressorti très facilement sans effort conséquent pour que le nettoyage de la piscine ne soit plus une contrainte. Le capteur d’eau qu’il embarque lui permet de démarrer automatiquement lorsque vous le plongez dans l’eau et commencer ainsi son travail de nettoyage. Les cassettes filtrantes qui équipent ce modèle Ruby ont une capacité importante pour lui permettre d’aller au bout de son cycle de nettoyage sans arrêt prématuré pour motif de filtre plein, et elles ont une capacité de filtration de 180 microns qui est particulièrement adaptée aux piscines où l’on retrouves des débris végétaux, morceaux de feuilles, terre, etc... Ruby détectera automatiquement sa sortie de l’eau gràce à ce même capteur et se coupera donc pour préserver totalement son moteur. Qualité de conception et de fabrication Bestway Gràce à son savoir-faire, Bestway propose aujourd’hui le modèle Ruby, un robot autonome qui vous libère des contraintes des càbles et permet un nettoyage efficace du fond à la ligne d’eau, adapté à tout type de piscine. La batterie Lithium-ion permet de conserver des performances constantes tout au long du cycle de nettoyage. C’est un élément technique important trop souvent négligé et qui sera pourtant déterminant pour une durée de vie optimale. Ruby n’est retenu par aucun càble, cela lui permet d’avoir une amplitude maximale pour ses déplacements. Plus petit et plus léger qu’un robot électrique classique, il sera plus facile à manipuler et vous facilitera grandement l’entretien de votre piscine. Pour quelles piscines ? Tout type de piscines hors-sol ou enterrées jusqu’à 8 x 4m Tout type de formes Fond plat et pentes composées jusqu’à 30° Tout revêtement (liner, carrelage, béton peint, coque, etc...) Informations complémentaires Batterie rechargeable : Lithium-ion 8800 mAh Autonomie de la batterie : 1h30 (soit 90...
- Moover : Moteur pour abri de piscine jusqu'a abri - AMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au bon endroit. Grâce à la conception unique, vous pouvez installer le MOOVER sur des abris neufs ou existants de la société ALBIXON ainsi que d’autres marques. Il n'est pas possible d'installer le Moover sur : les abri sans rails, Avec angle négatifou plus lourd que 750 kilos - Moteur pour abri de piscine MOOVER - ALBIXON Un design élégant et une autonomie remarquabl Le design du Moover est pensé pour s’intégrer facilement dans vos extérieurs. Il est discret et prend très peu de place afin de préserver l’espace autour du bassin. De plus, Moover est doté de panneaux solaires qui lui permettent de fonctionner durant toute la saison estivale soit 3 mois. Grâce à sa batterie haute capacité dernière technologie, il peut fonctionner 1,5 heures en continu et jusqu’à 800 heures en mode veille. Une révolution dans l’utilisation de votre abri de piscine Développé en collaboration avec des ingénieurs de l’automobile, Moover vous permet de faire bouger votre abri de piscine sans effort . Son secret réside dans sa roue motorisée située à l’intérieur du boîtier. Il vous suffit d’appuyer sur un bouton pour ensuite piquer une tête, Moover vous fait gagner du temps et économiser vos efforts. Et quand vous ne souhaitez pas activer l'assistance de Moover, il vous suffit de dévisser l’écrou papillon afin de relâcher la pression de la roue. Grâce à la télécommande avec une portée de 30 mètres, vous pouvez facilement contrôler l’ouverture et la fermeture de votre abri de piscine. Et elle est si simple d’utilisation que tous les membres de la famille peuvent l’utiliser. Motoriser votre abri de piscine devient un jeu d’enfant : Moover est livré avec une notice de montage très bien détaillée qui vous permet de monter facilement le système d’ouverture et de fermeture de l’abri de piscine. Vous pouvez le faire seul, cela ne vous prendra que quelques heures. Et n’oubliez pas que les experts de Distripool sont à votre disposition pour vous aider à installer votre Moover. Moover s'adapte sur tous les abris de piscine dont le pas des arcs est de 1063 mm et le plan latéral ne présente pas d'angle d'incidence négatif. . Fiche technique : Moteur MOOVER pour abri de piscine Photo du MOOVER ALBIXON
- Moover : Moteur pour abri de piscine jusqu'a abri - CMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au bon endroit. Grâce à la conception unique, vous pouvez installer le MOOVER sur des abris neufs ou existants de la société ALBIXON ainsi que d’autres marques. Il n'est pas possible d'installer le Moover sur : les abri sans rails, Avec angle négatifou plus lourd que 750 kilos - Moteur pour abri de piscine MOOVER - ALBIXON Un design élégant et une autonomie remarquabl Le design du Moover est pensé pour s’intégrer facilement dans vos extérieurs. Il est discret et prend très peu de place afin de préserver l’espace autour du bassin. De plus, Moover est doté de panneaux solaires qui lui permettent de fonctionner durant toute la saison estivale soit 3 mois. Grâce à sa batterie haute capacité dernière technologie, il peut fonctionner 1,5 heures en continu et jusqu’à 800 heures en mode veille. Une révolution dans l’utilisation de votre abri de piscine Développé en collaboration avec des ingénieurs de l’automobile, Moover vous permet de faire bouger votre abri de piscine sans effort . Son secret réside dans sa roue motorisée située à l’intérieur du boîtier. Il vous suffit d’appuyer sur un bouton pour ensuite piquer une tête, Moover vous fait gagner du temps et économiser vos efforts. Et quand vous ne souhaitez pas activer l'assistance de Moover, il vous suffit de dévisser l’écrou papillon afin de relâcher la pression de la roue. Grâce à la télécommande avec une portée de 30 mètres, vous pouvez facilement contrôler l’ouverture et la fermeture de votre abri de piscine. Et elle est si simple d’utilisation que tous les membres de la famille peuvent l’utiliser. Motoriser votre abri de piscine devient un jeu d’enfant : Moover est livré avec une notice de montage très bien détaillée qui vous permet de monter facilement le système d’ouverture et de fermeture de l’abri de piscine. Vous pouvez le faire seul, cela ne vous prendra que quelques heures. Et n’oubliez pas que les experts de Distripool sont à votre disposition pour vous aider à installer votre Moover. Moover s'adapte sur tous les abris de piscine dont le pas des arcs est de 1063 mm et le plan latéral ne présente pas d'angle d'incidence négatif. . Fiche technique : Moteur MOOVER pour abri de piscine Photo du MOOVER ALBIXON
- Moover : Moteur pour abri de piscine jusqu'a abri - BMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au
- Moover : Moteur pour abri de piscine jusqu'a abri - CMoover : Le moteur pour abri piscine ! Vous avez investi dans un abri de piscine mais quand il s’agit de profiter de votre piscine, il vous faut l’ouvrir et le refermer une fois la baignade terminée. Si vous êtes à la recherche d’une solution pour motoriser votre abri de piscine, alors vous êtes au
 Volet immergé piscine moteur dans l'axe Roussillon IILe volet immergé piscine ROUSSILLON moteur dans l'axe est la solution idéale pour couvrir et sécurisé sa piscine. Le moteur est situé dans l'axe. C'est le modèle idéal quand la piscine est déjà en eau. Ce volet immergé est fabriqué en France, il est aussi conforme à la norme NF P90-308. Prix à partir de : piscine de 5.00 x 3.00 m Sans escalier - Caillebotis ALU - Sans cloison de séparation (hors transport) - Volet immergé piscine ECA ROUSSILLON Moteur dans l'axe Enrouleur complet avec moteur dans l'axe. Axe + moteur et coffret garantie 4 ans + coffret avec contact pour électrolyseur au sel . Commutateur à clé déportée 3 positions avec contact maintenue . Dimensions maxi 8.03 x 12.00 m Avec Fin de course intégré Lames de couleur au même prix que les blanches !! Lames 71 mm - épaisseur 17 mm. PVC traité anti-tâche et anti UV Les lames sont fabriquées en PVC stabilisé au calcium de ZINC afin d'éviter les tâches. A chaque extrémité de la lame, des bouchons soudés assurent l'étanchéité du tablier. Des ailettes de 20 mm assurent la finition. Système de sécurité : Le nombre de système de sécurité est déterminé par la largueur du bassin. En fonction des cotes fournies sur la fiche de fabrication, ECA se réserve le droit de modifier le nombre de système de sécurité. Ces chiffres sont indiqués sous réserve et seront considérablement plus élevés dans des climats plus chauds et en cas de vent. < à 3 m = 2 par largueur de 3 à 5 m = 3 par largueur de 5 à 7 m = 4 par largueur En option : système de sécurité sur arase. Caillebotis conforme à la norme NF P-90-308 : Le caillebotis repose d'une part sur la poutrelle et d'autre part sur le mesure de l'arase. Nos caillebotis sont composés de lame de 125 mm. Nous vous rappelons qu'il n'est pas possible de couper les lames pour en réduire la largueur ( prévoir découpe des margelles ). 3 types de caillebotis : En aluminium double face blanc. ( sable et gris en option ). En bois IPE ( en option ) En composite de couleur bois ou gris ( en option ) 2 tailles : 700 x 1000 mm. 900 x 1000 ( en option ) Sur mesure ( en option ) Poutrelle en aluminium au choix ! Poutrelle en alu de 100 x 70 mm 3 couleurs : boitier réglable, boitier à fixer sur la paroi Poutrelle en alu de 100 x 110 mm 3 couleurs : boitier réglable, boitier à fixer sur la paroi, boitier pour profil liner horizontal, boitier profil liner vertical Blanche, sable ou grise
Volet immergé piscine moteur dans l'axe Roussillon IILe volet immergé piscine ROUSSILLON moteur dans l'axe est la solution idéale pour couvrir et sécurisé sa piscine. Le moteur est situé dans l'axe. C'est le modèle idéal quand la piscine est déjà en eau. Ce volet immergé est fabriqué en France, il est aussi conforme à la norme NF P90-308. Prix à partir de : piscine de 5.00 x 3.00 m Sans escalier - Caillebotis ALU - Sans cloison de séparation (hors transport) - Volet immergé piscine ECA ROUSSILLON Moteur dans l'axe Enrouleur complet avec moteur dans l'axe. Axe + moteur et coffret garantie 4 ans + coffret avec contact pour électrolyseur au sel . Commutateur à clé déportée 3 positions avec contact maintenue . Dimensions maxi 8.03 x 12.00 m Avec Fin de course intégré Lames de couleur au même prix que les blanches !! Lames 71 mm - épaisseur 17 mm. PVC traité anti-tâche et anti UV Les lames sont fabriquées en PVC stabilisé au calcium de ZINC afin d'éviter les tâches. A chaque extrémité de la lame, des bouchons soudés assurent l'étanchéité du tablier. Des ailettes de 20 mm assurent la finition. Système de sécurité : Le nombre de système de sécurité est déterminé par la largueur du bassin. En fonction des cotes fournies sur la fiche de fabrication, ECA se réserve le droit de modifier le nombre de système de sécurité. Ces chiffres sont indiqués sous réserve et seront considérablement plus élevés dans des climats plus chauds et en cas de vent. < à 3 m = 2 par largueur de 3 à 5 m = 3 par largueur de 5 à 7 m = 4 par largueur En option : système de sécurité sur arase. Caillebotis conforme à la norme NF P-90-308 : Le caillebotis repose d'une part sur la poutrelle et d'autre part sur le mesure de l'arase. Nos caillebotis sont composés de lame de 125 mm. Nous vous rappelons qu'il n'est pas possible de couper les lames pour en réduire la largueur ( prévoir découpe des margelles ). 3 types de caillebotis : En aluminium double face blanc. ( sable et gris en option ). En bois IPE ( en option ) En composite de couleur bois ou gris ( en option ) 2 tailles : 700 x 1000 mm. 900 x 1000 ( en option ) Sur mesure ( en option ) Poutrelle en aluminium au choix ! Poutrelle en alu de 100 x 70 mm 3 couleurs : boitier réglable, boitier à fixer sur la paroi Poutrelle en alu de 100 x 110 mm 3 couleurs : boitier réglable, boitier à fixer sur la paroi, boitier pour profil liner horizontal, boitier profil liner vertical Blanche, sable ou grise- Volet immergé piscine moteur dans l'axe Roussillon IILe volet immergé piscine ROUSSILLON moteur dans l'axe est la solution idéale pour couvrir et sécurisé sa piscine. Le moteur est situé dans l'axe. C'est le modèle idéal quand la piscine est déjà en eau. Ce volet immergé est fabriqué en France, il est aussi conforme à la norme NF P90-308. Prix à part
 ASTRAL POOL Pompe filtration piscine easySelect compatible au sel 20 m3/h 1,10 kWDescription de la pompe easySelect compatible au sel Pompe auto-amorçante (4 m) avec préfiltre incorporé. Monophasée de 7 m³/h à 20 m³/h. Compatible électrolyse au sel (7 g/l). Corps de pompe, diffuseur et pied amovible en polypropylène chargé en fibre de verre. Turbine Noryl chargé en fibre de verre. Axe moteur en inox AISI 420. Garniture mécanique graphite et alumine. Protection IP55. Inclus 2 m de câble avec prise, à coller Ø 50 mm. Dimensions de la pompe easySelect Astral Bering one compatible au sel Courbes de rendements de la pompe Astral Bering one compatible au sel
ASTRAL POOL Pompe filtration piscine easySelect compatible au sel 20 m3/h 1,10 kWDescription de la pompe easySelect compatible au sel Pompe auto-amorçante (4 m) avec préfiltre incorporé. Monophasée de 7 m³/h à 20 m³/h. Compatible électrolyse au sel (7 g/l). Corps de pompe, diffuseur et pied amovible en polypropylène chargé en fibre de verre. Turbine Noryl chargé en fibre de verre. Axe moteur en inox AISI 420. Garniture mécanique graphite et alumine. Protection IP55. Inclus 2 m de câble avec prise, à coller Ø 50 mm. Dimensions de la pompe easySelect Astral Bering one compatible au sel Courbes de rendements de la pompe Astral Bering one compatible au sel- ASTRAL POOL Pompe filtration piscine easySelect compatible au sel 13 m3/h 0,50 kWDescription de la pompe easySelect compatible au sel Pompe auto-amorçante (4 m) avec préfiltre incorporé. Monophasée de 7 m³/h à 20 m³/h. Compatible électrolyse au sel (7 g/l). Corps de pompe, diffuseur et pied amovible en polypropylène chargé en fibre de verre. Turbine Noryl chargé en fibre de verre. Axe moteur en inox AISI 420. Garniture mécanique graphite et alumine. Protection IP55. Inclus 2 m de câble avec prise, à coller Ø 50 mm. Dimensions de la pompe easySelect Astral Bering one compatible au sel Courbes de rendements de la pompe Astral Bering one compatible au sel
 Robot piscine hydraulique Zodiac T3 6,5 m/minDescriptif du robot piscine hydraulique Zodiac T3 Nettoyez votre piscine enterrée ou hors sol à l'aide du robot piscine Zodiac T3 ! Efficace, le robot piscine Zodiac T3 nettoie parfaitement les parois les plus rigides et supporte tous les revêtements. Avec son moteur hydraulique dernière génération, le robot Zodiac T3 vous assure une puissance d'aspiration incomparable. Le moteur puissant combiné aux ailerons offre au T3 une meilleure mobilité. Votre robot aspire ainsi tous les recoins de votre bassin. Doté d'une technologie brevetée Twist and Lock, le robot piscine Zodiac T3 vous permet une connexion sécurisée des tuyaux pour une meilleure performance d'aspiration. Le tuyau, parfaitement étanche, se branche directement sur la prise balai ou le skimmer. Le robot piscine Zodiac T3 se déplace aléatoirement et est équipé d'un système anti-blocage lui permettant de déjouer tous les pièges : escaliers, angles, échelles, bondes de fond ... Vidéo de présentation du robot piscine hydraulique Zodiac T3 Caractéristiques techniques du robot piscine hydraulique Zodiac T3 Formes de bassin : rectangulaire ou ovale Fonctionnement par diaphragme DiaCyclone Source d'énergie par filtration Aspiration de débris fins et moyens Largeur nettoyée : 30 cm Longueur de tuyau 10 sections de 1 m Dimensions du robot (D X P X h) 41 x 36 x 28 cm Dimensions emballage (L x P x h) 102,8 x 41,5 x 22,4 cm Poids du robot 1,2 kg Poids emballé 6,8 kg Capacité de filtration Circuit de filtration de la piscine Largeur nettoyée 30 cm Puissance minimum requise de la pompe de filtration 1/2 CV Vitesse de déplacement 6,5 m / min
Robot piscine hydraulique Zodiac T3 6,5 m/minDescriptif du robot piscine hydraulique Zodiac T3 Nettoyez votre piscine enterrée ou hors sol à l'aide du robot piscine Zodiac T3 ! Efficace, le robot piscine Zodiac T3 nettoie parfaitement les parois les plus rigides et supporte tous les revêtements. Avec son moteur hydraulique dernière génération, le robot Zodiac T3 vous assure une puissance d'aspiration incomparable. Le moteur puissant combiné aux ailerons offre au T3 une meilleure mobilité. Votre robot aspire ainsi tous les recoins de votre bassin. Doté d'une technologie brevetée Twist and Lock, le robot piscine Zodiac T3 vous permet une connexion sécurisée des tuyaux pour une meilleure performance d'aspiration. Le tuyau, parfaitement étanche, se branche directement sur la prise balai ou le skimmer. Le robot piscine Zodiac T3 se déplace aléatoirement et est équipé d'un système anti-blocage lui permettant de déjouer tous les pièges : escaliers, angles, échelles, bondes de fond ... Vidéo de présentation du robot piscine hydraulique Zodiac T3 Caractéristiques techniques du robot piscine hydraulique Zodiac T3 Formes de bassin : rectangulaire ou ovale Fonctionnement par diaphragme DiaCyclone Source d'énergie par filtration Aspiration de débris fins et moyens Largeur nettoyée : 30 cm Longueur de tuyau 10 sections de 1 m Dimensions du robot (D X P X h) 41 x 36 x 28 cm Dimensions emballage (L x P x h) 102,8 x 41,5 x 22,4 cm Poids du robot 1,2 kg Poids emballé 6,8 kg Capacité de filtration Circuit de filtration de la piscine Largeur nettoyée 30 cm Puissance minimum requise de la pompe de filtration 1/2 CV Vitesse de déplacement 6,5 m / min Robot piscine Zodiac OT 3200 Tornax - TILERobot piscine Zodiac OT 3200 Le robot de piscine électrique Zodiac Vortex OT 3200, il permet de nettoyer le fond et les parois pour votre piscine jusqu'à 9 x 4 m. Il permet grâce à ses brosses actives de décoller les débris pour être aspirés grâce à un puissant moteur. Toute la technologie ZODIAC à petit prix Mais le gros point fort de ce robot électrique OT3200, c'est son poids ! Seulement 5.5 kg. Le robot fond et paroi le plus léger du marché. Version TILD : Compatible tout revêtement : Liner, béton carrelage et coque polyester. - Robot piscine Tornax OT 3200 TILE by Zodiac Voici la nouvelle collection de robot fond + paroi de chez ZODIAC. Le robot Vortex OV3400 by zodiac. Zodiac a travaillé un nouveau look design et moderne tout en travaillant sur le poids grâce à des matériaux le plus léger possible. Robot Zodiac OT 3200 : Fiche technique
Robot piscine Zodiac OT 3200 Tornax - TILERobot piscine Zodiac OT 3200 Le robot de piscine électrique Zodiac Vortex OT 3200, il permet de nettoyer le fond et les parois pour votre piscine jusqu'à 9 x 4 m. Il permet grâce à ses brosses actives de décoller les débris pour être aspirés grâce à un puissant moteur. Toute la technologie ZODIAC à petit prix Mais le gros point fort de ce robot électrique OT3200, c'est son poids ! Seulement 5.5 kg. Le robot fond et paroi le plus léger du marché. Version TILD : Compatible tout revêtement : Liner, béton carrelage et coque polyester. - Robot piscine Tornax OT 3200 TILE by Zodiac Voici la nouvelle collection de robot fond + paroi de chez ZODIAC. Le robot Vortex OV3400 by zodiac. Zodiac a travaillé un nouveau look design et moderne tout en travaillant sur le poids grâce à des matériaux le plus léger possible. Robot Zodiac OT 3200 : Fiche technique- Robot piscine Zodiac OT 3200 Tornax - TILERobot piscine Zodiac OT 3200 Le robot de piscine électrique Zodiac Vortex OT 3200, il permet de nettoyer le fond et les parois pour votre piscine jusqu'à 9 x 4 m. Il permet grâce à ses brosses actives de décoller les débris pour être aspirés grâce à un puissant moteur. Toute la technologie ZODIAC à
 Robot piscine Clean Pool O² BestwayRobot électrique de piscine Clean Pool O² Bestway Très autonome, le robot électrique Clean Pool O² Bestway effectue un nettoyage complet de la piscine, depuis le fond de celle-ci et jusqu’à la ligne d’eau. C’est un aspirateur performant équipé de 2 moteurs qui assurent respectivement les fonctions de filtration et de déplacement. Avec une finesse de filtration de 180 microns, il s’encrasse moins rapidement pour permettre un nettoyage complet de la piscine avant de nettoyer son filtre, ce qui est particulièrement utile pour les piscines dans lesquelles vous retrouvez plutôt des débris de végétaux apportés par le vent. Pour quelles piscines ? Pour tout type de piscine : jusqu’à 100m² soit environ 16 x 6m Pour tout type de forme : rectangulaire, ovale, ronde et forme libre Type de fond : tout type de fond Type de revêtement : carrelage, liner, coque polyester, béton peint, PVC armé (les brosses mousses PVA installées d’origine sur le robot sont compatible avec tous les revêtements) Choix de programmes de nettoyage auto-adaptatifs Autonome, le robot Clean Pool O² Bestway effectue un nettoyage complet en adaptant automatiquement son comportement au programme choisi et à la configuration de la piscine. Vous disposez d’un choix parmi trois cycles de nettoyage : 1h 2h 3h Caractéristiques techniques Type de nettoyage : fond, parois et ligne d’eau Cycle de nettoyage : 1 heure / 2 heures / 3 heures Finesse de filtration : 180 microns Vitesse de déplacement : 8 m/minute Puissance : 90W Longueur càble : 12 m Dimensions du robot : 43 x 37 x 21,5cm 1 - Ouverture facile par le dessus du robot pour un accès rapide aux cassettes filtrantes. 2- Filtration performante et grande capacité pour assurer un cycle de fonctionnement complet. Garantie légale de conformité et des vices cachés : 2 ans
Robot piscine Clean Pool O² BestwayRobot électrique de piscine Clean Pool O² Bestway Très autonome, le robot électrique Clean Pool O² Bestway effectue un nettoyage complet de la piscine, depuis le fond de celle-ci et jusqu’à la ligne d’eau. C’est un aspirateur performant équipé de 2 moteurs qui assurent respectivement les fonctions de filtration et de déplacement. Avec une finesse de filtration de 180 microns, il s’encrasse moins rapidement pour permettre un nettoyage complet de la piscine avant de nettoyer son filtre, ce qui est particulièrement utile pour les piscines dans lesquelles vous retrouvez plutôt des débris de végétaux apportés par le vent. Pour quelles piscines ? Pour tout type de piscine : jusqu’à 100m² soit environ 16 x 6m Pour tout type de forme : rectangulaire, ovale, ronde et forme libre Type de fond : tout type de fond Type de revêtement : carrelage, liner, coque polyester, béton peint, PVC armé (les brosses mousses PVA installées d’origine sur le robot sont compatible avec tous les revêtements) Choix de programmes de nettoyage auto-adaptatifs Autonome, le robot Clean Pool O² Bestway effectue un nettoyage complet en adaptant automatiquement son comportement au programme choisi et à la configuration de la piscine. Vous disposez d’un choix parmi trois cycles de nettoyage : 1h 2h 3h Caractéristiques techniques Type de nettoyage : fond, parois et ligne d’eau Cycle de nettoyage : 1 heure / 2 heures / 3 heures Finesse de filtration : 180 microns Vitesse de déplacement : 8 m/minute Puissance : 90W Longueur càble : 12 m Dimensions du robot : 43 x 37 x 21,5cm 1 - Ouverture facile par le dessus du robot pour un accès rapide aux cassettes filtrantes. 2- Filtration performante et grande capacité pour assurer un cycle de fonctionnement complet. Garantie légale de conformité et des vices cachés : 2 ans Gré Robot de piscine Wet Runner Xpert Gre RBR120Robot de piscine électrique Wet Runner Xpert Gre Autonome, puissant et rapide Le Robot RBR120 de la marque Gre est principalement recommandé pour les piscines enterrées et hors-sol avec une pente maximale de 15%, idéal pour le fond. Ses 2 moteurs et son aspiration cyclonique brevetée lui permettent d’effectuer un nettoyage approfondi de votre piscine jusqu’à 12 x 5 m sur tout type de surfaces. Son aspiration cyclonique maintient les débris en suspension pour une aspiration longue durée. Équipé de chenilles pour une meilleure adhérence sur tous les revêtements. Très facile d’utilisation, il suffit de le positionner à l’aide de son crochet prévu à cet effet, et de le laisser quadriller la piscine pour la nettoyer. Outre sa grande facilité d’utilisation, le robot RBR120 offre une autonomie supérieure à celle de la plupart des robots sans fil gràce à sa batterie de 13 000 mAh d’une puissance de 51W et surtout très efficace. Doté de systèmes innovants, les robots électriques Gré ramassent et aspirent tous les gros résidus de votre piscine tels que des feuilles et des petits insectes voire des particules plus fines comme des grains de sable. Avec une capacité de filtration de 3L, l’accès au filtre se fait par la partie supérieure, permettant un rinçage sans contact avec les débris. Gràce à son crochet, il sera facile de le sortir de l’eau. Pour quelles piscines ? Tout type de piscines enterrées et hors-sol jusqu’à 60m² soit 12 x 5m Tout type de formes Fond plat et faible pente inférieure à 15% Tout revêtement (liner, carrelage, béton peint, coque, etc...) Caractéristiques du produit Marque : Gre Type de piscine : Toute piscine enterrée ou hors-sol Pente maximale du fond : 15% Surface de nettoyage maximale : jusqu’à 60 m² (soit une piscine de 12x5m) Type de batterie : 13 000 mAh Temps de charge : 6h Puissance : 51W Autonomie à partir d’une charge pleine : 2h soit 120 minutes Puissance d’aspiration : 6 m3/h Capacité de filtration : 3 L Dimensions robot : 38,5 x 35,5 x 23,9 cm Poids du robot : 5,2 kg Garantie légale de conformité et des vices cachés : 2 ans
Gré Robot de piscine Wet Runner Xpert Gre RBR120Robot de piscine électrique Wet Runner Xpert Gre Autonome, puissant et rapide Le Robot RBR120 de la marque Gre est principalement recommandé pour les piscines enterrées et hors-sol avec une pente maximale de 15%, idéal pour le fond. Ses 2 moteurs et son aspiration cyclonique brevetée lui permettent d’effectuer un nettoyage approfondi de votre piscine jusqu’à 12 x 5 m sur tout type de surfaces. Son aspiration cyclonique maintient les débris en suspension pour une aspiration longue durée. Équipé de chenilles pour une meilleure adhérence sur tous les revêtements. Très facile d’utilisation, il suffit de le positionner à l’aide de son crochet prévu à cet effet, et de le laisser quadriller la piscine pour la nettoyer. Outre sa grande facilité d’utilisation, le robot RBR120 offre une autonomie supérieure à celle de la plupart des robots sans fil gràce à sa batterie de 13 000 mAh d’une puissance de 51W et surtout très efficace. Doté de systèmes innovants, les robots électriques Gré ramassent et aspirent tous les gros résidus de votre piscine tels que des feuilles et des petits insectes voire des particules plus fines comme des grains de sable. Avec une capacité de filtration de 3L, l’accès au filtre se fait par la partie supérieure, permettant un rinçage sans contact avec les débris. Gràce à son crochet, il sera facile de le sortir de l’eau. Pour quelles piscines ? Tout type de piscines enterrées et hors-sol jusqu’à 60m² soit 12 x 5m Tout type de formes Fond plat et faible pente inférieure à 15% Tout revêtement (liner, carrelage, béton peint, coque, etc...) Caractéristiques du produit Marque : Gre Type de piscine : Toute piscine enterrée ou hors-sol Pente maximale du fond : 15% Surface de nettoyage maximale : jusqu’à 60 m² (soit une piscine de 12x5m) Type de batterie : 13 000 mAh Temps de charge : 6h Puissance : 51W Autonomie à partir d’une charge pleine : 2h soit 120 minutes Puissance d’aspiration : 6 m3/h Capacité de filtration : 3 L Dimensions robot : 38,5 x 35,5 x 23,9 cm Poids du robot : 5,2 kg Garantie légale de conformité et des vices cachés : 2 ans Exit Toys Pompe à chaleur pour piscine hors-sol de 22m³La pompe à chaleur électrique de chez Exit Toys est recommandée pour les piscines hors-sol de 22 m³. Elle bénéficie d'un moteur de 1300 W et d'une tension d'entrée de 230 V. Elle chauffe simplement votre piscine en transf...
Exit Toys Pompe à chaleur pour piscine hors-sol de 22m³La pompe à chaleur électrique de chez Exit Toys est recommandée pour les piscines hors-sol de 22 m³. Elle bénéficie d'un moteur de 1300 W et d'une tension d'entrée de 230 V. Elle chauffe simplement votre piscine en transf... Pompe piscine STA RITE PENTAIR de 16 m3/h (1CV ) - TriphaséPompe piscine STA - RITE modèle P-STR La pompe piscine STA - RITE est la pompe la plus haut de gamme, résistante à toutes épreuves, des rendement surpuissant, un moteur ultra silencieux. Le moteur bénéfice de la technologie PENTAIR éprouvé et efficace renforcé en fibre de verre, une turbine haute pression pour un débit maximale COMPATIBLE ELECTROLYSEUR - Pompe STA RITE 5P2R de 3/4 à 1.5 CV en mono La pompe STA - RITE de la série 5P2R est en matériau de synthèse renforcé à la fibre de verre et obtenue par moulage de haute précision. Moteur Moteur européen conforme aux normes “CE” et muni d’une protection IP 55. La conception spéciale du diffuseur assure un auto-amorçage très efficace. Embase La pompe STA RITE 5P2R est montée sur une embase surélevée, stable, rigide et antivibrations. La hauteur de l’embase préserve le moteur de l’humidité et des souillures. Collier d’assemblage Le collier d’assemblage, en acier inoxydable, permet un démontage rapide de l’ensemble et un accès aisé aux pièces mobiles. Obtenue par le moulage sous pression, la turbine est conçue pour délivrer une hauteur manométrique élevée. Sa finition et son équilibrage dynamique lui assurent un fonctionnement silencieux et un excellent rendement. Le couvercle transparent du préfiltre permet facilement de vérifier l’état de colmatage du panier. Le couvercle a un ø de 127 mm et résiste à une pression de 4 bar. le panier du préfiltre est verrouillable et protège la turbine des impuretés. Construction Le matériau utilisé pour la fabrication de la pompe sta rite et du préfiltre autorise une pression de service élevée. Testé pendant plusieurs années ce matériau a des caractéristiques incomparables et résiste même à des variations de températures importantes. Presse-étoupe Comme sur des millions de pompes STA-RITE une étanchéité parfaite est obtenue par le presse-étoupe en céramique de carbone finement polie et surfacée. Données Techniques La pompes de la série 5P2R est une pompe centrifuge qui est principalement conçue pour l’application dans la piscine, en combinaison avec un filtre de piscine.
Pompe piscine STA RITE PENTAIR de 16 m3/h (1CV ) - TriphaséPompe piscine STA - RITE modèle P-STR La pompe piscine STA - RITE est la pompe la plus haut de gamme, résistante à toutes épreuves, des rendement surpuissant, un moteur ultra silencieux. Le moteur bénéfice de la technologie PENTAIR éprouvé et efficace renforcé en fibre de verre, une turbine haute pression pour un débit maximale COMPATIBLE ELECTROLYSEUR - Pompe STA RITE 5P2R de 3/4 à 1.5 CV en mono La pompe STA - RITE de la série 5P2R est en matériau de synthèse renforcé à la fibre de verre et obtenue par moulage de haute précision. Moteur Moteur européen conforme aux normes “CE” et muni d’une protection IP 55. La conception spéciale du diffuseur assure un auto-amorçage très efficace. Embase La pompe STA RITE 5P2R est montée sur une embase surélevée, stable, rigide et antivibrations. La hauteur de l’embase préserve le moteur de l’humidité et des souillures. Collier d’assemblage Le collier d’assemblage, en acier inoxydable, permet un démontage rapide de l’ensemble et un accès aisé aux pièces mobiles. Obtenue par le moulage sous pression, la turbine est conçue pour délivrer une hauteur manométrique élevée. Sa finition et son équilibrage dynamique lui assurent un fonctionnement silencieux et un excellent rendement. Le couvercle transparent du préfiltre permet facilement de vérifier l’état de colmatage du panier. Le couvercle a un ø de 127 mm et résiste à une pression de 4 bar. le panier du préfiltre est verrouillable et protège la turbine des impuretés. Construction Le matériau utilisé pour la fabrication de la pompe sta rite et du préfiltre autorise une pression de service élevée. Testé pendant plusieurs années ce matériau a des caractéristiques incomparables et résiste même à des variations de températures importantes. Presse-étoupe Comme sur des millions de pompes STA-RITE une étanchéité parfaite est obtenue par le presse-étoupe en céramique de carbone finement polie et surfacée. Données Techniques La pompes de la série 5P2R est une pompe centrifuge qui est principalement conçue pour l’application dans la piscine, en combinaison avec un filtre de piscine.- Pompe piscine STA RITE PENTAIR de 18 m3/h (1.5CV ) - TriphaséPompe piscine STA - RITE modèle P-STR La pompe piscine STA - RITE est la pompe la plus haut de gamme, résistante à toutes épreuves, des rendement surpuissant, un moteur ultra silencieux. Le moteur bénéfice de la technologie PENTAIR éprouvé et efficace renforcé en fibre de verre, une turbine haute pression pour un débit maximale COMPATIBLE ELECTROLYSEUR - Pompe STA RITE 5P2R de 3/4 à 1.5 CV en mono La pompe STA - RITE de la série 5P2R est en matériau de synthèse renforcé à la fibre de verre et obtenue par moulage de haute précision. Moteur Moteur européen conforme aux normes “CE” et muni d’une protection IP 55. La conception spéciale du diffuseur assure un auto-amorçage très efficace. Embase La pompe STA RITE 5P2R est montée sur une embase surélevée, stable, rigide et antivibrations. La hauteur de l’embase préserve le moteur de l’humidité et des souillures. Collier d’assemblage Le collier d’assemblage, en acier inoxydable, permet un démontage rapide de l’ensemble et un accès aisé aux pièces mobiles. Obtenue par le moulage sous pression, la turbine est conçue pour délivrer une hauteur manométrique élevée. Sa finition et son équilibrage dynamique lui assurent un fonctionnement silencieux et un excellent rendement. Le couvercle transparent du préfiltre permet facilement de vérifier l’état de colmatage du panier. Le couvercle a un ø de 127 mm et résiste à une pression de 4 bar. le panier du préfiltre est verrouillable et protège la turbine des impuretés. Construction Le matériau utilisé pour la fabrication de la pompe sta rite et du préfiltre autorise une pression de service élevée. Testé pendant plusieurs années ce matériau a des caractéristiques incomparables et résiste même à des variations de températures importantes. Presse-étoupe Comme sur des millions de pompes STA-RITE une étanchéité parfaite est obtenue par le presse-étoupe en céramique de carbone finement polie et surfacée. Données Techniques La pompes de la série 5P2R est une pompe centrifuge qui est principalement conçue pour l’application dans la piscine, en combinaison avec un filtre de piscine.
 Pompe piscine STA RITE PENTAIR de 12 m3/h en mono ( 3/4 CV )Pompe piscine STA - RITE modèle P-STR La pompe piscine STA - RITE est la pompe la plus haut de gamme, résistante à toutes épreuves, des rendement surpuissant, un moteur ultra silencieux. Le moteur bénéfice de la technologie PENTAIR éprouvé et efficace renforcé en fibre de verre, une turbine haute pression pour un débit maximale COMPATIBLE ELECTROLYSEUR - Pompe STA RITE 5P2R de 3/4 à 1.5 CV en mono La pompe STA - RITE de la série 5P2R est en matériau de synthèse renforcé à la fibre de verre et obtenue par moulage de haute précision. Moteur Moteur européen conforme aux normes “CE” et muni d’une protection IP 55. La conception spéciale du diffuseur assure un auto-amorçage très efficace. Embase La pompe STA RITE 5P2R est montée sur une embase surélevée, stable, rigide et antivibrations. La hauteur de l’embase préserve le moteur de l’humidité et des souillures. Collier d’assemblage Le collier d’assemblage, en acier inoxydable, permet un démontage rapide de l’ensemble et un accès aisé aux pièces mobiles. Obtenue par le moulage sous pression, la turbine est conçue pour délivrer une hauteur manométrique élevée. Sa finition et son équilibrage dynamique lui assurent un fonctionnement silencieux et un excellent rendement. Le couvercle transparent du préfiltre permet facilement de vérifier l’état de colmatage du panier. Le couvercle a un ø de 127 mm et résiste à une pression de 4 bar. le panier du préfiltre est verrouillable et protège la turbine des impuretés. Construction Le matériau utilisé pour la fabrication de la pompe sta rite et du préfiltre autorise une pression de service élevée. Testé pendant plusieurs années ce matériau a des caractéristiques incomparables et résiste même à des variations de températures importantes. Presse-étoupe Comme sur des millions de pompes STA-RITE une étanchéité parfaite est obtenue par le presse-étoupe en céramique de carbone finement polie et surfacée. Données Techniques La pompes de la série 5P2R est une pompe centrifuge qui est principalement conçue pour l’application dans la piscine, en combinaison avec un filtre de piscine.
Pompe piscine STA RITE PENTAIR de 12 m3/h en mono ( 3/4 CV )Pompe piscine STA - RITE modèle P-STR La pompe piscine STA - RITE est la pompe la plus haut de gamme, résistante à toutes épreuves, des rendement surpuissant, un moteur ultra silencieux. Le moteur bénéfice de la technologie PENTAIR éprouvé et efficace renforcé en fibre de verre, une turbine haute pression pour un débit maximale COMPATIBLE ELECTROLYSEUR - Pompe STA RITE 5P2R de 3/4 à 1.5 CV en mono La pompe STA - RITE de la série 5P2R est en matériau de synthèse renforcé à la fibre de verre et obtenue par moulage de haute précision. Moteur Moteur européen conforme aux normes “CE” et muni d’une protection IP 55. La conception spéciale du diffuseur assure un auto-amorçage très efficace. Embase La pompe STA RITE 5P2R est montée sur une embase surélevée, stable, rigide et antivibrations. La hauteur de l’embase préserve le moteur de l’humidité et des souillures. Collier d’assemblage Le collier d’assemblage, en acier inoxydable, permet un démontage rapide de l’ensemble et un accès aisé aux pièces mobiles. Obtenue par le moulage sous pression, la turbine est conçue pour délivrer une hauteur manométrique élevée. Sa finition et son équilibrage dynamique lui assurent un fonctionnement silencieux et un excellent rendement. Le couvercle transparent du préfiltre permet facilement de vérifier l’état de colmatage du panier. Le couvercle a un ø de 127 mm et résiste à une pression de 4 bar. le panier du préfiltre est verrouillable et protège la turbine des impuretés. Construction Le matériau utilisé pour la fabrication de la pompe sta rite et du préfiltre autorise une pression de service élevée. Testé pendant plusieurs années ce matériau a des caractéristiques incomparables et résiste même à des variations de températures importantes. Presse-étoupe Comme sur des millions de pompes STA-RITE une étanchéité parfaite est obtenue par le presse-étoupe en céramique de carbone finement polie et surfacée. Données Techniques La pompes de la série 5P2R est une pompe centrifuge qui est principalement conçue pour l’application dans la piscine, en combinaison avec un filtre de piscine.- Pompe piscine STA RITE PENTAIR de 12 m3/h ( 3/4 CV ) - TriphaséPompe piscine STA - RITE modèle P-STR La pompe piscine STA - RITE est la pompe la plus haut de gamme, résistante à toutes épreuves, des rendement surpuissant, un moteur ultra silencieux. Le moteur bénéfice de la technologie PENTAIR éprouvé et efficace renforcé en fibre de verre, une turbine haute pression pour un débit maximale COMPATIBLE ELECTROLYSEUR - Pompe STA RITE 5P2R de 3/4 à 1.5 CV en mono La pompe STA - RITE de la série 5P2R est en matériau de synthèse renforcé à la fibre de verre et obtenue par moulage de haute précision. Moteur Moteur européen conforme aux normes “CE” et muni d’une protection IP 55. La conception spéciale du diffuseur assure un auto-amorçage très efficace. Embase La pompe STA RITE 5P2R est montée sur une embase surélevée, stable, rigide et antivibrations. La hauteur de l’embase préserve le moteur de l’humidité et des souillures. Collier d’assemblage Le collier d’assemblage, en acier inoxydable, permet un démontage rapide de l’ensemble et un accès aisé aux pièces mobiles. Obtenue par le moulage sous pression, la turbine est conçue pour délivrer une hauteur manométrique élevée. Sa finition et son équilibrage dynamique lui assurent un fonctionnement silencieux et un excellent rendement. Le couvercle transparent du préfiltre permet facilement de vérifier l’état de colmatage du panier. Le couvercle a un ø de 127 mm et résiste à une pression de 4 bar. le panier du préfiltre est verrouillable et protège la turbine des impuretés. Construction Le matériau utilisé pour la fabrication de la pompe sta rite et du préfiltre autorise une pression de service élevée. Testé pendant plusieurs années ce matériau a des caractéristiques incomparables et résiste même à des variations de températures importantes. Presse-étoupe Comme sur des millions de pompes STA-RITE une étanchéité parfaite est obtenue par le presse-étoupe en céramique de carbone finement polie et surfacée. Données Techniques La pompes de la série 5P2R est une pompe centrifuge qui est principalement conçue pour l’application dans la piscine, en combinaison avec un filtre de piscine.
Le moteur à combustion et explosion[a] désigne tout type de moteur à combustion interne à pistons alternatifs ou rotatifs, Diesel, semi-Diesel ou à allumage commandé dans lesquels les gaz brûlent avec un front de flamme dont la vitesse est, normalement, inférieure à celle du son[b].
Le premier moteur à combustion à un cylindre a été réalisé par Eugenio Barsanti et Felice Matteucci en 1854. Le moteur à combustion à deux temps est réalisé par Étienne Lenoir en 1859. Le moteur à combustion à quatre temps est inventé par Beau de Rochas en 1862, développé par Nikolaus Otto en 1867, puis perfectionné par Gottlieb Daimler et Wilhelm Maybach en 1886, suivi par le moteur à boule chaude en 1891 puis le moteur Diesel en 1893.
Ce type de moteur est principalement utilisé pour la propulsion des véhicules de transport (tels qu’avions, automobiles, motos, camions et bateaux), pour de nombreux outils mobiles (tels que tronçonneuses et tondeuses à gazon) et pour de nombreuses installations fixes (groupes électrogènes, pompes, etc.).
Moteur à quatre temps à allumage commandé[modifier | modifier le code]

Il s’agit de tous les moteurs utilisant comme carburant de l’essence, de l’alcool, voire un gaz (GPL, etc.) ou autre, et dont la combustion est déclenchée par une source d’énergie externe fournie par un système d’allumage et se matérialisant généralement par une étincelle produite par une bougie.
Ces moteurs transforment l’énergie potentielle, chimique, stockée dans un carburant en travail (énergie mécanique) grâce à des combustions très rapides, d’où le terme, injustement utilisé, d’« explosion »[a]. Ils sont constitués d’un ou plusieurs cylindres ou chambres de combustion permettant de confiner les combustions et d’en utiliser l’énergie. Dans les moteurs à pistons alternatifs, chaque piston coulisse en un mouvement rectiligne alternatif à l’intérieur d’un cylindre. Ce mouvement est transformé en rotation par l’intermédiaire d’une bielle reliant le piston au vilebrequin, un assemblage de manivelles sur un axe[c].
Avec soupapes[modifier | modifier le code]

Chaque cylindre est fermé par une culasse munie d’au moins deux soupapes[d] : la première, la soupape d’admission, permet l’alimentation en mélange air/essence du cylindre par le collecteur d’admission ; la deuxième, la soupape d’échappement, permet l’évacuation des gaz brulés vers le collecteur d’échappement.
Sans soupapes[modifier | modifier le code]
Il a existé des moteurs sans soupapes, celles-ci étant remplacées par des chemises mobiles dites « louvoyantes » découvrant des lumières. Ce principe a été utilisé avec succès (excellente fiabilité, très bon rendement, silence de fonctionnement[1]) sur les moteurs d’avion Bristol Hercules qui furent également construits sous licence par la Snecma jusque dans les années 1970, pour l’équipement des avions de transport militaire Noratlas et Breguet 890 Mercure. Deux systèmes de moteurs sans soupapes ont été construits, le système Knight, avec deux manchons en mouvement en haut et bas de direction contraire pour le manchon externe et l’interne, que l’on installait sur les voitures Willys, Daimler, Panhard, Voisin, Minerva, Peugeot et d’autres, et le système à manchon unique, type Burt-McCollum, avec un mouvement simultané en haut et en bas et à droite et à gauche, un point quelconque du manchon faisait une sorte d’ellipse, qui n’avait pas les sérieux problèmes du système Knight, et aussi éliminait les régions à forte usure par faible graissage proches du PMS et PMI de la course du piston. D’après un entretien avec Mike Hewland[2], il a réussi à faire tourner au-dessus de 10 000 tr/min un monocylindre de 500 cm3 avec ce type de distribution, premièrement installée sur les voitures Argyll, puis dans les moteurs d’aviation Bristol, avec une consommation d’huile plus réduite que sur les moteurs avec soupapes traditionnelles, et une consommation spécifique de gazoline d’environ 175 g/ch par heure, le moteur fonctionnait aussi avec de la créosote. Les efforts plus intenses pour le développement du système Burt-McCollum ont été faits en Angleterre par H. Ricardo et R. Fedden. Le moteur Wankel (/[vɑ̃kɛl]/) est un moteur à piston rotatif fonctionnant selon le cycle de Beau de Rochas, dans lequel un piston « triangulaire » convertit l’énergie issue de la combustion du carburant en une énergie mécanique de rotation.
Fonctionnement[modifier | modifier le code]
Le cycle de fonctionnement se décompose de manière analytique en quatre temps ou phases. Le mouvement du piston est initié par la combustion (augmentation rapide de la température et donc de la pression des gaz) d’un mélange de carburant et d’air (comburant) qui a lieu durant le temps moteur. C’est le seul temps avec un bilan de transformation d’énergie positif ; les trois autres temps utilisent une partie de l’énergie transformée mais le bilan total reste positif ce qui rend le fonctionnement possible. Le piston se déplace pendant le démarrage grâce à une source d’énergie externe (souvent un démarreur ou lanceur : un moteur électrique est couplé temporairement au vilebrequin) jusqu’à ce qu’au moins un temps moteur produise une force capable d’assurer les trois autres temps avant le prochain temps moteur[3]. Le moteur fonctionne dès lors seul et produit un couple sur son arbre de sortie.
Voici une description des cycles successifs d’un moteur à quatre temps :
- Admission d’un mélange d’air et de carburant pulvérisé, préalablement mélangé et préparé par divers composants (carburateur ou système d’injection indirecte) : ouverture de la (des) soupape(s) d’admission et descente du piston, ce dernier aspire ce mélange dans le cylindre à une pression de 100 à 300 mbar (moteur non-suralimentés dits « atmosphériques ») à 2 500 mbar environ pour un moteur suralimenté d’automobile de série (exprimé en pression absolue) ;
- Compression du mélange : fermeture de la soupape d’admission, puis remontée du piston qui comprime le mélange jusqu’à 30 bar et 400 à 500 °C dans la chambre de combustion ;
- Combustion[e] et détente aux environs du point mort haut (PMH) : moment auquel le piston atteint son point culminant et auquel la compression est au maximum ; la bougie d’allumage, connectée à un système d’allumage haute tension, produit une étincelle quelques degrés avant le PMH ; la combustion initiée qui s’ensuit constitue le temps moteur ; les gaz chauds à une pression de 40 à 60 bar repoussent le piston, initiant le mouvement ;
- Échappement : ouverture de la (ou des) soupape(s) d’échappement et remontée du piston qui chasse les gaz brûlés détendus dans le collecteur d’échappement.
Et le cycle recommence en 1.
Comme le moteur thermique à allumage commandé, le moteur diesel est constitué de pistons coulissants dans des cylindres, fermés par une culasse reliant les cylindres aux collecteurs d’admission et d’échappement, culasse équipée de soupapes commandées par un ou plusieurs arbres à cames. Le fonctionnement repose sur l’auto-inflammation du gazole, fioul lourd ou encore huile végétale brute dans de l’air comprimé à un rapport de compression de plus de 1:15 du volume du cylindre, dont la température est portée à quelque 600 °C. Sitôt le carburant injecté (pulvérisé) dans l’air comprimé, celui-ci s’enflamme presque instantanément, sans qu’il ne soit nécessaire de recourir à un allumage commandé par bougie. En brûlant, le mélange augmente fortement la température et la pression (sur les anciens Diesel la pression d’injection était de 130 à 200 bar alors que dans les Diesel modernes « common rail » elle peut atteindre 2 000 bar ce qui favorise une combustion plus complète et moins polluante), repoussant le piston qui fournit un travail sur une bielle, laquelle entraîne la rotation du vilebrequin (ou arbre manivelle faisant office d’axe moteur, voir système bielle-manivelle).

Le cycle Diesel à quatre temps comporte :
- Admission d’air par l’ouverture de la (des) soupape(s) d’admission et la descente du piston ;
- Compression de l’air par remontée du piston, la (les) soupape(s) d’admission étant fermée(s) ;
- Injection — combustion — détente : peu avant le point mort haut, on introduit, par un injecteur haute pression le carburant pour former un mélange instable avec l’oxygène de l’air comprimé. La combustion rapide qui s’ensuit constitue le temps moteur, les gaz chauds en expansion rapide repoussent le piston, libérant une partie de leur énergie. Celle-ci peut être mesurée par la courbe de puissance moteur ;
- Échappement des gaz brûlés par l’ouverture de la (des) soupape(s) d’échappement, poussés par la remontée du piston.
Les seules bougies présentes sur un moteur Diesel sont les bougies de « préchauffage » qui, comme leur nom l’indique, préchauffent les chambres de combustion (ou les préchambres suivant le type de Diesel) afin d’obtenir, lorsque le moteur est froid, une température suffisante pour l’auto-inflammation du carburant. Ce système assure parfois également un « post-chauffage » visant à assurer la stabilité en rotation du moteur et la diminution des émissions polluantes lors des basses températures.
Historique[modifier | modifier le code]
Le premier moteur à deux temps fut imaginé et réalisé par Étienne Lenoir en 1859. Il utilisait un gaz d’éclairage. Il fonctionne selon le cycle de Lenoir. Dans sa version économique dotée d’un simple carburateur, son rendement est plus faible et il est plus polluant, mais d’une puissance et d’un couple nettement plus élevés (60 à 70 %) qu’un moteur à quatre temps de la même cylindrée au même régime ; il est demeuré longtemps et reste encore le moteur exclusif et performant des cyclomoteurs et de quelques motos sportives répliques de motos de compétition en GP et tout-terrain. Depuis 1990, on s’intéresse de nouveau aux moteurs à deux temps pour l’automobile mais en injection directe pneumatique[4], solution de plus en plus utilisée de nos jours sur les deux-roues de petite cylindrée et qui répond aux normes anti-pollution Euro 3.
Technique[modifier | modifier le code]

1) admission, compression et explosion,
2) détente, transfert et échappement.
Les moteurs « deux temps » respectent le cycle de Beau de Rochas en utilisant les deux côtés du piston : la partie supérieure pour les phases de compression et de combustion et la partie inférieure pour assurer le transfert des gaz d’admission (et par voie de conséquence, d’échappement). Ils épargnent ainsi les mouvements (donc latence, frottements, etc.) de deux cycles non producteurs d’énergie et produisent davantage de couple et de puissance. Entre les deux systèmes de balayage existant pour les moteurs 2-temps (le système Schnürle – en anglais : Schuerle porting – ou en boucle et l’écoulement à sens unique appelé uniflux ou « équicourant »), des recherches récentes ont montré que le système à boucle est toujours meilleur que le système uniflux (ou équicourant).
La puissance théorique d’un moteur 2-temps est le double de celle d’un moteur 4-temps, mais le fait de supprimer deux temps crée des difficultés car il faut expulser les gaz brûlés avant d’admettre l’air et cela dans un temps très court[f]. On doit effectuer simultanément l’échappement et l’admission au voisinage du PMB (point mort bas) avec le secours obligatoire d’une pression d’air supérieure à la pression atmosphérique fournie soit par une pompe de balayage attelée (alternative ou rotative), soit par une turbo-soufflante. 30 à 40 % de l’énergie créée par la course motrice est absorbée par les pompes de balayage attelées ; d’où l’utilisation des turbo-soufflantes (TS) qui utilisent l’énergie des gaz d’échappement, ce qui améliore le rendement global.
Avantages[modifier | modifier le code]
Les moteurs 2-temps permettent de bénéficier théoriquement du double de travail par cycle (un cycle moteur par tour de vilebrequin, au lieu d’un cycle moteur pour deux tours de vilebrequin pour le moteur 4-temps). Cependant l’étanchéité demeure difficile à assurer et certains effets liés à l’emplacement des canaux de transfert de gaz (admission et échappement) font perdre près de 30 % de l’énergie développée.
Les principaux avantages de ces moteurs sont :
- une combustion à chaque tour moteur et une puissance spécifique (puissance/cylindrée) très élevée, donc une puissance massique très élevée ;
- une simplicité de construction (peu de pièces en mouvement) ;
- un graissage des éléments en rotation quelle que soit l’inclinaison du moteur ;
- des pertes par frottements internes nettement plus faibles que sur un 4-temps (vilebrequin sur roulements, pas de distribution à entraîner, pas de segment racleur, régime nettement plus faible à puissance équivalente fournie) ;
- un caractère moteur très expressif, qui fonctionne de mieux en mieux à l’approche de son régime maxi. Tout l’opposé du 4-temps qui semble forcer et vouloir « éjecter » ses composants dans ce cas ;
- plus de puissance développée qu’un moteur 4-temps, pour le même nombre de tours moteurs (une explosion par tour de vilebrequin pour les 2-temps et une explosion tous les 2 tours de vilebrequin pour les moteurs 4-temps ;
- un transfert de chaleur au système de refroidissement du moteur plus faible par rapport aux moteurs à quatre temps, donc une meilleure efficacité du point de vue du cycle thermodynamique.
Inconvénients[modifier | modifier le code]
Les principaux inconvénients des moteurs 2-temps sont :
- une plus forte consommation spécifique, due à la partie de gaz imbrûlés qui sont expulsés du moteur durant la phase de transfert. Pour y remédier, une injection directe permet de faire pénétrer une dose précise de carburant dans la chambre de combustion transferts fermés. Un pot d’échappement accordé, dit pot de détente, permet d’éviter la perte par l’échappement et fait profiter au remplissage d’un effet « compresseur » en gavant le cylindre avant la fermeture de la lumière d’échappement dans sa plage d’accord. Une soupape à l’échappement étend cette plage, soit en diminuant la hauteur de la lumière d’échappement, soit en faisant communiquer avec le pot une chambre qui va abaisser la fréquence de résonance de ce dernier. L’injection d’eau dans le pot (pour le refroidir) le fait s’accorder plus bas. La diminution de l’avance à l’allumage le fait chauffer et s’accorder plus haut (la vitesse des ondes étant proportionnelle à la température du pot) ;
- une usure plus rapide due à la partie supérieure de la (ou des) lumière(s) d’échappement qui torture les segments lors de leur passage : ils y subissent des contraintes différentes et importantes, compensée par une vitesse de rotation plus faible à puissance égale ;
- la lubrification est réalisée par mélange (en général de 1,5 à 3 % d’huile dans l’essence) ou graissage séparé par pompe avec injection d’huile directement dans les roulements parfois (Suzuki). Les huiles modernes brûlent quasi complètement lors de la combustion, cependant la pollution est due aux hydrocarbures imbrûlés, liés à la simultanéité du transfert, du mélange air/carburant vers le haut du cylindre, et de l’échappement ;
- un faible frein moteur.
Pour ces différentes raisons, mais surtout à cause de l’entrée en vigueur, partout dans le monde, de normes anti-pollutions plus contraignantes, y compris pour les motos, les moteurs 2-temps à carburateur sont en voie de disparition, car ils polluent beaucoup plus que des moteurs 4-temps équivalents (tondeuses à gazon, tronçonneuses, cyclomoteurs, moteurs hors-bord, petits groupes électrogènes, motoculteurs, véhicules de modélisme, etc.). En revanche, plusieurs entreprises ont conçu des moteurs 2-temps à injection directe (l’australien Orbital Engine Corporation — maintenant Synerject — notamment et son système AsDI : Air-assisted Synerject Direct Injection) et de grands constructeurs de scooters l’ont adopté sur certains de leurs modèles (Peugeot, Aprilia, Piaggio et Kymco)[5].
Moteur à allumage par compression 2-temps[modifier | modifier le code]
Les moteurs 2-temps présentent encore un fort potentiel dans des secteurs tels que celui des très grandes puissances[6][source insuffisante] (propulsion marine ou production électrique) où des Diesel 2-temps dits « moteurs lents » délivrent plus de 100 000 ch avec un rendement général pouvant dépasser 50 % grâce à la cogénération (la chaleur du circuit de refroidissement pouvant être utilisée pour la climatisation du navire par exemple). Ce sont des moteurs comptant cinq à quatorze cylindres en ligne dont le diamètre des pistons atteint 1 m et la course 2,50 m[7]. La vitesse de rotation de leur arbre est d’environ 100 tr/min d’où leurs principales qualités la fiabilité et la faible consommation. Par contre, leur hauteur (environ 17 m) et leur masse (plus de 1 000 t) limitent leur utilisation. Les moteurs à quatre temps de puissance équivalente sont environ trois fois moins lourds et moins coûteux, au prix d’une chute de rendement de l’ordre de 3 % et d’une durabilité moindre liée à l’usure plus rapide des pièces en mouvement (rotation plus rapide et faible guidage des pistons)[réf. nécessaire]. Certains de ces moteurs 2-temps utilisés en génération électrique ont duré plus de cinquante ans.[réf. nécessaire]
Certains moteurs d’avions utilisent également ce principe, assez ancien[Lequel ?], puisque déjà utilisé par les moteurs Clerget des années 1930. Aujourd’hui[Quand ?], le plus connu est le moteur Wilksch, un tricylindre 2-temps de 120 ch suralimenté par compresseur. L’avantage du moteur Diesel 2-temps est un rapport poids/puissance équivalent à un 4 temps essence, mais avec un meilleur rendement et l’utilisation d’un carburant trois fois moins cher, le kérosène voire le fioul lourd économique mais très polluant[8].
Le rendement d’un moteur est le rapport entre l’énergie mécanique délivrée et l’énergie thermique fournie par le carburant. Il dépend du cycle thermodynamique choisi, des paramètres de fonctionnement (taux de compression) et des pertes thermiques, mécaniques (frottement), d’écoulement (dans l’admission et l’échappement) ainsi que des pertes dues aux accessoires nécessaires à son fonctionnement tels que pompe d’injection (moteur diesel), ventilateur de refroidissement, pompe de refroidissement, pompe à huile, alternateur, compresseur de climatisation et autres éventuels accessoires[g]. Le rendement maximal pour les moteurs automobiles modernes est de 40 % environ pour les moteurs à allumage[9] et de 45 % pour les moteurs Diesel alors que les plus gros moteurs industriels dépassent 50 %, grâce à la cogénération[réf. nécessaire]. En effet, l’énergie nécessairement perdue suivant le cycle de Carnot peut être récupérée, par exemple pour réchauffer un autre fluide tel que l’eau chaude sanitaire sur les bateaux, améliorant sensiblement le bilan énergétique global de l’installation.
Dans le cas d’un moteur automobile qui fonctionne rarement à forte charge et de manière toujours transitoire, le rendement réel pratique est plus faible. Pour rouler à vitesse stabilisée à 120 km/h, la majorité des voitures n’a guère besoin de plus de 20 kW alors que les moteurs peuvent souvent en fournir deux à huit fois plus, ce qui conduit à un rendement pratique très dégradé. Du fait des pertes complémentaires liées à la transmission (98 % pour la boite manuelle par exemple) , aux périodes d’arrêt moteur au ralenti, le rendement réel pratique d’une voiture ne dépasse guère 12 %[10].

Les défauts du moteur à combustion interne classique sont : son médiocre rendement, ses vibrations et son niveau de pollution. De nombreuses architectures distinctes sont nées au cours de l’histoire, beaucoup sont restées à l’état de dessins ou de maquettes, certaines ont donné des prototypes fonctionnels, et quelques rares architectures ont eu droit à la production industrielle. La plus connue, utilisée notamment dans les automobiles, est celle du moteur à piston rotatif, le moteur Wankel, utilisé par Citroën et NSU, puis perfectionné par Mazda. Il existe aussi l’architecture de type cycle d’Atkinson, utilisée par Toyota dans ses véhicules hybrides commercialisés depuis 1997.
Une architecture tout aussi originale, à l’état de prototype, est celle de la quasiturbine. Pour l’instant, aucun constructeur ne semble vouloir détrôner le moteur à pistons avec son vilebrequin et ses soupapes. La société anglaise ILMOR a mis au point un moteur 5-temps, avec double expansion, pour faire un meilleur usage de l’énergie qui est perdue dans les gaz d’échappement. Otto lui-même avait construit au XIXe siècle quelque chose de semblable, mais sans succès.
Cylindrée[modifier | modifier le code]
La cylindrée d’un moteur est le volume total (tous cylindres) déplacé durant un cycle. Elle est calculée à partir du diamètre d’un cylindre (l’alésage), de la distance parcourue par un piston (la course) et du nombre de cylindres :

avec :
- Vm : volume, exprimé en cm3 ;
- A : alésage, en cm ;
- C : course, en cm ;
- N : nombre de cylindres.
Puissance[modifier | modifier le code]

La puissance développée par un moteur est souvent représentée par une courbe de puissance moteur. Elle doit être mesurée selon certaines normes définissant en particulier les accessoires mis en œuvre et les conditions de température et de pression. Elle est toujours supérieure à la puissance réellement disponible aux roues pour un véhicule du fait des pertes dans la transmission. L’unité légale utilisée est le kW mais souvent accolée au cheval-vapeur (ch)[h] pour des raisons historiques.
C’est le « couple à bas régime » qui permet de faire accélérer un véhicule sans avoir besoin de faire « monter le régime moteur »[i], mais c’est la puissance maximum qui détermine la vitesse que pourra atteindre ce véhicule[i]. La boîte de vitesses permet d’augmenter le couple sur les roues motrices tout en réduisant le régime moteur et réciproquement, selon l’objectif poursuivi (accélération/économie de carburant).
La puissance est la capacité à transmettre de l’énergie en fonction du temps. Le watt est égal à un joule par seconde, 1 W = 1 J/s. La notion de couple prise isolée ne fait pas intervenir le mouvement[pas clair].
Équations notables du calcul de la puissance :
- puissance (HP) = couple (m kg) × rpm / 716 ;
- puissance (HP) = couple (m daN) × rpm / 702,83 ;
- puissance (HP) = couple (lb ft) × rpm / 5 252 ;
- puissance (HP) = force (kg) × vitesse (km/h) / 273,8 ;
- puissance (HP) = force (lb) × vitesse (mph) / 77,2 ;
- puissance (W) = couple (N m) × rpm × π / 30 = couple (N m) × (tr/s) × 2 π
avec :
Couple[modifier | modifier le code]
Le couple maximal exercé sur l’axe. L’unité légale utilisée est le newton mètre (N m) (bien que le kilogramme-force mètre (kg m) reste courant). La puissance est le produit du couple par la vitesse de rotation (pour obtenir des watts, il faut multiplier le couple en N × m par la vitesse de rotation en radians par seconde oméga.).
Taux de compression[modifier | modifier le code]
Le taux de compression théorique d’un moteur à pistons exprime le rapport entre la pression au point mort bas et celle au point mort haut[j]. Plus il est élevé plus le mélange est comprimé donc plus l’explosion est forte, donc difficile à gérer (cliquetis, choc mécanique, température, etc.) mais plus le rendement du moteur est élevé[k].
Vitesse maximale de rotation[modifier | modifier le code]
La vitesse maximale de rotation est généralement exprimée en tours par minute. Elle correspond à la vitesse de rotation que le moteur peut atteindre quand on accélère au maximum. On peut augmenter cette vitesse maximale de rotation avec une préparation moteur mais il faut savoir que plus le moteur tourne vite, plus il s’use (les moteurs de Formule 1 des années 2000 atteignent 19 500 tr/min (comme le moteur RS26 de Renault en 2006) mais doivent être révisés, voire remplacés, fréquemment.
Aussi, avec l’augmentation de régime d’un moteur thermique, les pertes par frictions internes croissent avec le cube de ce dernier ; il en résulte donc une dégradation du rendement global du moteur avec l’augmentation du régime.[réf. nécessaire]
Puissance spécifique[modifier | modifier le code]
La puissance spécifique exprime la puissance produite en fonction de la cylindrée (volume de gaz contenus après le cycle d’admission). Elle est souvent exprimée en la rapportant au litre de cylindrée. Un moteur de 500 cm3 développant 33 ch présente ainsi un « rendement de puissance » de 66 ch/L tandis qu’un 3 000 cm3 développant 120 ch n’en offre que 40. L’augmentation de la puissance spécifique est d’autant plus aisée que la cylindrée unitaire diminue (donc que le nombre de cylindres augmente) puisque la puissance augmente avec le régime. Or, un moteur de forte cylindrée unitaire fonctionnant rapidement développe des moments mettant l’ensemble, en particulier le piston, à rude épreuve, donc diminue sa fiabilité.
Tel que décrit précédemment, la norme est de parler de puissance au litre, mais il est parfois plus avantageux de parler de puissance au litre par 1 000 tr/min (défini ici comme étant Plm) afin de pouvoir avoir une idée plus précise du travail fait sur le moteur. Faire le calcul donne le niveau de développement d’un moteur. On retrouve des moteurs de série procurant des Plm de beaucoup inférieurs à 15 ch (moteur sans suralimentation). La configuration de certains moteurs ne permettra pas de se rendre à ce niveau de rendement même avec des modifications. Pour les moteurs deux soupapes atmosphériques, bien souvent, la limite est d’environ 13 ch/L par 1 000 tr/min.
La limite de puissance qu’un moteur peut obtenir est fonction de sa configuration, de sa cylindrée et du régime moteur. L’expérience montre toutefois que pour un moteur atmosphérique, la limite de puissance Plm est d’environ 16 ch/L par 1 000 tr/min, mais souvent de 15 ch/L par 1 000 tr/min au régime où la puissance maximale est atteinte pour un moteur atmosphérique.
Voici deux exemples :
- un moteur de 1 l tournant à 12 000 tr/min peut développer 180 ch (moteur de certaines motos routières sportives des années 2010)[11] ;
- un moteur de 3 l tournant à 18 000 tr/min peut développer 810 ch (moteur de Formule 1).
Ceci est vrai peu importe la cylindrée, l’alésage et la course d’un moteur.
Puissance massique[modifier | modifier le code]
La puissance massique est un rapport entre la puissance développée et la masse du moteur. Dans le cas d’un moteur à poste fixe, elle n’exprime le plus souvent rien d’utile, mais les constructeurs d’aéronefs lui accordent par contre une grande importance.
Pressions moyennes[modifier | modifier le code]
La pression moyenne indicative représente la qualité de la combustion et l’étanchéité du moteur.
La pression moyenne effective (PME) est une image de la puissance spécifique. C’est le produit de la pression moyenne indicative par le rendement.
Les combustions répétées surchauffent les pièces en contact (ex. : piston et segment, cylindre, soupape, bougie) et la chaleur se diffuse par conduction sur l’ensemble des pièces mécaniques du moteur. Il faut donc les refroidir sous peine de destruction. Pour un bon fonctionnement, les moteurs à combustion interne ont besoin d’une température stabilisée et adaptée c’est le rôle principal du circuit de refroidissement.
Refroidissement à air[modifier | modifier le code]

En 1875 le Français Alexis de Bischop utilise de l’air pour le refroidissement. Son moteur sans compression préalable, de type mixte, comporte un cylindre entouré d’ailettes métalliques qui augmentent la surface en contact avec l’air. Ce type de refroidissement est surtout utilisé pour les moteurs de faible puissance dont les cyclomoteurs et motos de faible cylindrée, mais aussi sur des automobiles, comme certaines Porsche, GS, la 2 CV ou la Coccinelle et les Panhard PL 17. Le refroidissement par air est aussi majoritaire pour les moteurs à pistons équipant les avions. Le refroidissement à air a longtemps été la référence pour les moteurs de motos (même s’il a toujours existé des moteurs de motos à refroidissement liquide) mais les problèmes entraînés par le haut rendement de ces moteurs (casse, usure prématurée) ont conduit à la quasi généralisation du refroidissement liquide malgré les avantages spécifiques pour la moto du refroidissement à air (encombrement, poids, simplicité, prix).
Il peut être optimisé par l’utilisation d’un ventilateur dont la présence ne révèle toutefois pas toujours un refroidissement à air car il dissipe parfois la chaleur du radiateur d’un système de refroidissement liquide. Le refroidissement par air convient mieux aux températures extrêmes d’ambiance, très chaudes ou sous zéro, mais surtout en usage aéronautique où elles ont causé quelques problèmes par refroidissement trop intensif et rapide dans certaines situations (en anglais : shock cooling). L’avantage pour les moteurs à refroidissement d’air pour l’aéronautique est la légèreté de la construction ainsi que sa simplicité. Les moteurs à pistons sur les avions sont équipés d’un allumage doublé avec deux bougies par cylindre[l], par exemple le moteur Continental O-200 ou Rolls-Royce O-200 (identique) qui équipe l’avion d’école le plus répandu au monde : le Cessna 150/152[m].
Refroidissement liquide[modifier | modifier le code]

L’Anglais Samuel Brown invente le refroidissement du moteur par de l’eau afin d’améliorer les performances du refroidissement[réf. nécessaire]. Dans son moteur, l’eau entraînée par une pompe circule autour des cylindres entourés d’une chemise, l’eau est refroidie par contact direct avec l’air ambiant. Plus tard, on ajouta à l’eau différents adjuvants qui devint alors le liquide de refroidissement. Le radiateur fut inventé en 1897 par l’ingénieur allemand Wilhelm Maybach[réf. nécessaire]. Après de nombreux tâtonnements, il met au point le radiateur dit « nid d’abeille » qui permet le refroidissement très efficace d’un liquide. Il est composé d’un faisceau de conduits courts et étroits entre lesquels circule l’air. L’air peut être accéléré par un ventilateur placé devant ou derrière lui. Ce radiateur est situé dans un circuit fermé ou semi-fermé empli d’un liquide (à base d’eau) assurant le refroidissement du moteur. Dans les moteurs les plus anciens, la circulation d’eau est assurée par thermosiphon : l’eau chauffée par le moteur monte vers le radiateur, placé en hauteur. Une fois refroidie, elle redescend vers le moteur. Dans les moteurs modernes, on utilise une pompe à eau.
Un contrôle permanent de la température vise à maintenir l’eau et parfois l’huile dans des conditions permettant une lubrification optimale. Idéalement, pour un moteur à 4 temps, la température du liquide de refroidissement doit se situer entre 95 et 110 °C[12]. Pour un moteur à 2 temps, la température du liquide de refroidissement doit se situer entre 50 et 60 °C. Cette température est déterminée par plusieurs facteurs tels que les tolérances d’usinage, la résistance au frottement des pièces mécaniques, et les lubrifiants utilisés. La régulation de cette température est généralement obtenue par une vanne thermostatique située dans le circuit de refroidissement, associée, parfois, à un ou plusieurs ventilateurs pilotés par un thermocontact qui ferme leur circuit d’alimentation électrique (réglé à la température maximale supportable en permanence par le moteur). Dans les moteurs marins, le radiateur est remplacé par un échangeur de chaleur eau / eau. L’eau extérieure récupérant l’énergie du liquide de refroidissement interne au moteur.
Le radiateur à buses est un échangeur de chaleur dans lequel l’air en se réchauffant génère une certaine poussée. Cet effet est créé par l’introduction de l’air dans le refroidisseur au travers de fentes minces orientées dans le sens du déplacement du véhicule où il se dilate en se réchauffant et sort par une buse dans le sens inverse au déplacement. Le système ne génère aucune poussée lorsque le véhicule est immobilisé. Ce principe de refroidissement a été mis en œuvre sur les avions à moteur refroidi par eau. Le brevet de ce dispositif a été déposé en 1915 par Hugo Junkers.
Refroidissement par huile des moteurs à 4 temps[modifier | modifier le code]
Les moteurs à 4 temps utilisent un liquide pour la lubrification des pièces en mouvement, l’huile qui circule mise sous pression par une pompe. Ce liquide doit circuler dans les zones les plus chaudes et, surtout, en assurer le refroidissement correct. Tous utilisent plus ou moins le refroidissement par huile : carter d’huile bas moteur ventilé, parfois muni d’ailettes, un petit radiateur d’huile.
Exemples : le moteur 4 cylindres de la première moto Suzuki GSX-R[n] et le bicylindre à plat de la Citroën 2 CV utilisent un refroidissement mixte air-huile, avec un radiateur d’huile.
- Avantages
- Les canalisations, pompe, radiateur indépendant et liquide, spécifiques au refroidissement deviennent inutiles. Cela permet un net gain de poids et une plus grande simplicité de conception.
- Inconvénients
- L’huile transporte moins bien la chaleur que l’eau et les spécificités de ces huiles les rendent plus coûteuses pour l’utilisateur. De plus, le graissage du moteur est moins performant (à isopérimètre) car il y a des pertes de charge dues à la circulation dans le radiateur d’huile.

Les moteurs à combustion interne exigent une maintenance régulière de leurs différents organes. Le programme en est établi au moment de la conception par les constructeurs eux-mêmes.
Monocylindre[modifier | modifier le code]
En 1801, Philippe Lebon dépose un brevet pour un moteur à gaz à combustion interne, mais ce moteur reste à l’état de projet et Lebon, qui meurt en 1804, n’a jamais pu vraiment présenter son invention. Le Suisse François Isaac de Rivaz dépose le un brevet concernant un moteur à combustion interne[13],[14]. Le premier moteur à deux temps fut imaginé et réalisé par Étienne Lenoir en 1860[15]. Il fonctionne selon le cycle de Lenoir. L’on connaît un dispositif qui brûlait de la poudre, très proche d’un moteur à combustion interne et utilisé pour envoyer 3 000 m3 d’eau chaque jour aux jardins du palais de Versailles sous Louis XIV, dessiné par Christian Huygens en 1673 et construit en 1685. Vers 1862, les Allemands Otto et Langen, constatant le faible rendement du moteur à deux temps de Lenoir (1860), entreprirent une série d’améliorations : la plus décisive consista à synchroniser les mouvements dans la phase de compression. Ce moteur n’avait pourtant que peu à voir avec les moteurs actuels ; c’était en effet un moteur atmosphérique, c’est-à-dire que le piston, propulsé par l’explosion du gaz, n’était en prise et n’exerçait un travail moteur sur l’arbre qu’au début de la phase d’échappement, l’appel d’air rappelant le piston vers sa position de compression.
L’entreprise Motorenfabrik Otto & Cie fondée à Cologne en 1864 donna naissance en 1876 à la Deutz AG (qui existe toujours), une firme de construction de matériel agricole. Otto développa cette même année un moteur à combustion à quatre temps qu’il fit breveter en Allemagne. Toutefois, par suite d’un droit d’antériorité invoqué devant les tribunaux par Beau de Rochas, ce brevet fut annulé en 1886. Gottlieb Daimler et Carl Benz (1886), puis indépendamment, Siegfried Marcus à Vienne à partir de 1889, construisirent alors leurs premiers tracteurs en exploitant le moteur Otto.
Deux cylindres[modifier | modifier le code]
En V[modifier | modifier le code]
En ligne[modifier | modifier le code]
À plat[modifier | modifier le code]
Quatre cylindres[modifier | modifier le code]
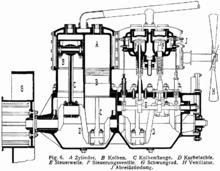

Panhard et Levassor, dès 1896, engagent un « quatre cylindres en ligne » sur l’épreuve Paris-Marseille-Paris. Deux ans plus tard, les multicylindres (à quatre cylindres) gagnent les grosses voitures et, progressivement, se généralisent à l’ensemble de la gamme, devenant, en quelque sorte, l’archétype mondial pour les voitures courantes de moyennes et basses gammes.
Une première variante, le quatre cylindres en V, fait son apparition en course à la charnière des deux siècles, sur des modèles Mors et Ader. Quelques années plus tard, cette solution séduit Peugeot et Ariès pour leurs modèles courants d’avant 1914. Beaucoup plus tard, à partir de 1962, Ford en fera une large utilisation, mais aussi Matra et SAAB. Deuxième variante, le quatre cylindres (en ligne) couché, que l’on trouve en compétition chez Amédée Bollée (1898/99) (premier moteur à quatre cylindres monobloc[o]) et chez Wolseley et Winton (1903[p],[q]. On l’a trouvée sur les motos BMW série K et sur les Peugeot 104 – 205, mais aussi sur les véhicules utilitaires ou monospace optant pour la solution « moteur sous le plancher ». Troisième variante, le 4-cylindres boxer. Emblématique, dans sa version refroidissement à air, des « coccinelles » de Volkswagen. Cette architecture a le grand avantage de faire bénéficier le véhicule qu’il motorise d’un centre de gravité assez bas. Une version musclée et turbocompressée équipe actuellement les Subaru Impreza qui sont de redoutables concurrentes du championnat du monde des rallyes WRC.
Mais la course — où la vitesse est recherchée — est exigeante en matière de puissance, surtout quand il s’agit de courses de côte. D’où la tentation d’augmenter le nombre de cylindres.
Six cylindres[modifier | modifier le code]

La marque néerlandaise Spyker avait présenté un modèle 6-cylindres en 1903[16]. Un modèle Chadwick aux États-Unis franchit le pas en 1907 pour la course de côte de Fairmont. L’année suivante, cette fois en Europe, Rolls-Royce fait de même pour la course Londres-Édimbourg, en faisant appel à des six cylindres. La transposition aux modèles courants est quasi immédiate pour les voitures de sport et de luxe. En Europe, c’est le cas pour Delaunay-Belleville, Napier, Mercedes, aux États-Unis pour Marmon. Plus tard, à partir de 1927, on trouvera des six cylindres (presque toujours en ligne) sur un grand nombre de modèles non sportifs, même pour des cylindrées modestes. L’atout principal de cette solution étant la souplesse de fonctionnement du moteur. Dans le monde de la moto, le 6-cylindres restera rare. On le trouve en compétition, en particulier chez Honda dans les années 1960 (moteur en ligne) ou chez Laverda en endurance (moteur en V).
Les moteurs de plus de quatre cylindres seront longtemps interdits en compétition. Sur les motos de tourisme, on trouve la Honda CBX 1000 (moteur à 24 soupapes refroidi par air) la Kawasaki Z 1300 (moteur à 12 soupapes refroidi par eau) et la Benelli 750 puis 900. En 2016, Honda propose toujours à son catalogue un modèle 6-cylindres à plat, la Gold Wing et BMW la K 1600 GT/GTL depuis 2011.
Huit cylindres et plus[modifier | modifier le code]

Une nouvelle étape est franchie quand on passe au « huit cylindres ». Ader (France) ouvre la voie en 1903 pour le Paris-Madrid, avec une unité à huit cylindres en V. La même année, apparaissent, toujours pour la compétition, des 8-cylindres en ligne. Les moteurs d’avion, à la recherche du plus faible poids pour une puissance donnée, aboutissent en 1908 au moteur rotatif à 5 ou 7 ou 9 ou 11 cylindres en étoile dont l’ensemble tourne autour d’un vilebrequin fixe[17]. Cette solution, adoptée pour beaucoup d’avions de la Première Guerre mondiale, ne survivra pas. Les moteurs d’avion des années 1930 et 1940 répondent à la demande sans cesse croissante de puissance. Les moteurs courants sont des V12 ou des moteurs en étoile de une à quatre rangées de 7 à 9 cylindres, soit 28 cylindres à la fin de la guerre pour le Pratt & Whitney R-4360 développant 3 500 ch ou 18 cylindres pour le Wright R-3350 aussi puissant, qui équipent le bombardier B29 puis la première génération d’avions de ligne transatlantiques, bientôt remplacés par les réacteurs.
Les Américains, amateurs de grandes automobiles et sans souci du prix de l’essence, démocratisent les gros V8 au couple très élevé et aux vitesses de rotation assez lentes. Les constructeurs des monoplaces de Formule 1 utilisent pendant longtemps des V8 de 3 litres de cylindrée, dont le fameux Ford Cosworth. Dans les années 1990, c’est la structure V10 qui a la faveur des motoristes de F1. Même l’écurie Ferrari, très attachée aux 12-cylindres en V, se plie à cette formule. À partir de 2006, les instances sportives (FIA) imposent un retour au V8 avec des contraintes de fiabilité plus importantes que par le passé. En 2006, les structures en V de 10 ou 12 cylindres et W16 sont réservées aux voitures sportives.
Les moteurs à combustion interne sont assez légers et petits, compensant un couple un peu faible par une vitesse de rotation élevée. Leur source d’énergie est peu encombrante et rapidement « renouvelable », ce qui en fait des moteurs tout à fait indiqués pour équiper de petits véhicules roulants, mais aussi volants. Il n’est plus nécessaire de traîner sa tonne de charbon en plus d’une citerne d’eau pour espérer avancer à une vitesse raisonnable. La facilité d’utilisation et de maintenance de ce type de moteur explique également son succès. Aussi, ces moteurs ne sont pas délicats et fonctionnent sans problème avec divers carburants, sans qu’il soit nécessaire de procéder à des modifications importantes. L’essence d’origine pétrolière est parfois remplacée par de l’alcool ou du gaz et le gazole par des huiles végétales, ce qui leur donne un intérêt même en cas de pénurie de combustibles fossiles.
Les moteurs à vapeur sont puissants, mais terriblement lourds et encombrants. De plus, ils nécessitent une longue phase de chauffage. En revanche, ils permettent un démarrage très efficace, grâce à la pression de vapeur accumulée.
Les moteurs électriques bénéficient d’un excellent rendement, mais utilisent une source d’énergie dont on maîtrise assez mal le stockage ou la production embarquée : les batteries d’accumulateur restent lourdes, encombrantes et, surtout, longues à recharger. Cependant, les progrès dans le stockage de l’énergie électrique permettront peut-être au moteur électrique de supplanter le moteur à combustion interne dans le domaine de l’automobile du fait de ses nombreux avantages.
Ces moteurs ne sont vraiment efficaces qu’à assez basse altitude, là où la teneur en oxygène de l’air est forte. Les moteurs à combustion interne ont permis l’envol des avions, mais ils les limitent également dans leur évolution. On peut compenser partiellement cet inconvénient par l’utilisation de compresseurs ou turbocompresseurs. Ils sont inutilisables dans des milieux ne contenant pas de dioxygène (sous-marins, véhicules extra-terrestres). La combustion entraîne le rejet de gaz polluants. Ils sont une des principales sources de pollution atmosphérique des villes.
Le rendement du moteur à combustion interne est plutôt mauvais par rapport au moteur électrique. D’autre part son rendement se dégrade très fortement en dehors de la plage de fonctionnement optimal. Dans le cas où la vitesse de rotation du dispositif doit pouvoir varier significativement (véhicule mobile, par exemple), ils nécessitent un système mécanique complexe (embrayage et boîte de vitesses) permettant la modification des rapports de rotations afin de maintenir le moteur dans sa plage de fonctionnement exploitable. Le couple étant nul au repos il est nécessaire d’utiliser un dispositif auxiliaire pour démarrer le moteur (manivelle, démarreur électrique, etc.).
Ils utilisent généralement un carburant d’origine fossile, ils ont donc besoin d’une source d’énergie qui n’est pas renouvelable à l’échelle humaine.Son utilisateur dépend de la fourniture de carburant et de son coût. Les moteurs à combustion interne utilisant des carburants fossiles rejettent du CO2 qui contribue à l’effet de serre. Le moteur à combustion interne réclame un entretien régulier (vidange huile et eau, changement des filtres air et carburant, réglages), pour conserver un rendement optimal et avoir une durée de vie maximale. Comparativement à un moteur électrique, ils sont beaucoup plus bruyants et génèrent plus de vibrations du fait du déplacement des nombreuses pièces mécaniques à l’intérieur.
Modification du mélange gazeux[modifier | modifier le code]
Parmi toutes les modifications améliorant le fonctionnement, on peut citer l’ajout d’eau ou de vapeur d’eau dans le mélange gazeux. Voir pour cela deux liens : Moteur à eau (en particulier la partie Moteur à eau : Injection d’eau dans les moteurs à combustion) et l’article dédié Injection d’eau dans les moteurs.
Taux de compression variable[modifier | modifier le code]
Appelé moteur VCR (Variable Compression Ratio). Le rendement s’améliore avec l’augmentation du taux de compression du mélange air/carburant. Cependant, trop compressé, le mélange s’auto-enflamme de manière prématurée, ce qui entraîne un phénomène de cliquetis mécaniquement destructeur. Une solution à ce problème consiste à faire varier dynamiquement le taux de compression. En effet, en ville par exemple le moteur fonctionne souvent à faible régime loin de sa charge optimale, avec un mauvais rendement que l’on peut constater par une consommation élevée. D’où l’intérêt d’adapter le taux de compression suivant la charge et les sollicitations.
En 1928, Louis Damblanc dépose un brevet pour moteur à compression variable. Après Volkswagen en 1987, c’est Saab qui dépose en 1990 un brevet et teste son moteur sur 100 000 km, avant de l’abandonner pour cause de bruit et vibrations excessives. Une solution proposée avec le moteur MCE-5 est de faire varier le volume de la chambre de combustion en faisant varier la hauteur du piston dans l’axe du cylindre grâce à une roue dentée et une crémaillère, avec un calcul électronique de la position optimale. La bielle commandant l’axe de la roue dentée et non plus le piston permet une suppression des efforts latéraux sur le piston et un gain complémentaire de rendement.
Le VCR est particulièrement intéressant couplé avec un turbocompresseur — sa présence imposant un faible taux de compression sur un moteur classique — alors qu’avec le VCR le taux de compression restera optimal. Parmi ses avantages, le VCR accepte plusieurs types de carburant (gaz…) et les gaz d’échappement étant plus chauds, le pot catalytique monte plus vite en température. Il faut régler des problèmes de poids, de tenue mécanique et des questions de coûts industriels. L’industrialisation d’un moteur VCR à grande échelle à l’horizon 2015-2020 reste très possible si pour des questions de coût de carburant ou de volonté politique, la réduction de la consommation devient un objectif prioritaire. Son industrialisation serait plus simple que celle d’un véhicule hybride[réf. nécessaire].
Notes[modifier | modifier le code]
- Une explosion ou détonation est une forme particulière de combustion pour laquelle la vitesse du front de flamme est au moins en partie supersonique. Dans les moteurs à allumage commandé, la détonation est un défaut de fonctionnement (cliquetis), normalement c’est une déflagration qui se produit au sein de ces moteurs.
- Il n’y a donc pas vraiment d’explosion du mélange sauf en cas de réglage incorrect de l’injection ou de l’ouverture des soupapes.
- Le moteur Wankel est un cas particulier qui n’utilise pas le système « bielle-manivelle ».
- Sauf dans le cas particulier des moteurs à soupapes latérales.
- Et non explosion, qui risquerait d’endommager la mécanique au niveau de la bielle et du vilebrequin.
- Les gros moteurs 2-temps des navires, tournant à quelques centaines de tours par minute, n’ont pas ce problème, leur conception est d’ailleurs très différente de celle des véhicules terrestre.
- Les accessoires, tels que le compresseur de climatisation, non nécessaires au fonctionnement du moteur, sont des consommateurs d’énergie au même titre que la propulsion du véhicule elle-même.
- 1 cheval-vapeur = 736 watts.
- Voir Formule 1.
- Ce rapport est théorique car il ne tient compte ni de la variation de température dans les cylindre ni du moment d’ouverture et de fermeture des soupapes.
- Voir l’étude thermodynamique du « cycle de Beau de Rochas ».
- Voir Moteurs d’avion Teledyne Continental.
- Voir Continental O-200 et sur Wikipédia en anglais.
- Munie du système SACS (Suzuki Advanced Cooling System), comprenant un radiateur d’huile à onze éléments.
- Les autres moteurs quatre cylindres à l’époque étaient des bicylindres ou des monocylindres accouplés
- Voir Wolseley Motor Company (en)
- Voir Winton Motor Carriage Company
Références[modifier | modifier le code]
- Pourquoi un moteur Bristol ?, noratlas-de-provence.com du , consulté le
- Car and Driver, juillet 1974
- Les premières motocyclettes étaient équipées de pédales permettant de les démarrer en pédalant comme sur un vélo. Ce système est encore très généralement utilisé sur les cyclomoteurs. Les motos ont ensuite été équipées de « kick », un levier au pied permettant , lorsque la moto est au point mort, de faire démarrer le moteur. Les motos modernes sont désormais équipées, dans leur immense majorité, de démarreurs électriques.
- (en) 2 Stroke Motorcycle Direct Injection, sur orbeng.com
- L’injection directe met le deux-temps à l’heure de l’écologie, sur dkw-elge.com
- https://www.actunautique.com/2021/05/un-tres-tres-gros-moulin-le-plus-gros-moteur-diesel-marin.html
- Moteur Wartsila [PDF], sur wartsila.com
- « La pollution du transport maritime plus dangereuse que celle du transport automobile », sur lemonde.fr, 22 juillet 2015 (consulté le )
- Toyota developpe de nouvelles motorisations plus efficientes et plus reactives, .toyota.fr du , consulté le
- (en) Advanced Technologies & Energy Efficiency, sur fueleconomy.gov
- Le GSX-R 1000 R modèle 2018 développe une puissance de 202 ch pour un poids tous pleins faits de 203 kg. Sa vitesse est limitée électroniquement d’origine à 300 km/h.
- « e) Le thermostat », sur enseeiht.fr (consulté le 16 janvier 2018)
- « François Isaac de Rivaz dépose le brevet du moteur à explosion », sur L’Internaute (consulté le )
- Henri Michelet, L’inventeur Isaac de Rivaz 1752-1828 : Ses recherches techniques et ses tentatives industrielles, , p. 231
- Jacques Payen, Les brevets de Lenoir concernant le moteur à combustion interne, vol. 16, Revue d’histoire des sciences et de leurs applications, , 374-380 p., chap. 16-4
- Autos, Encyclopédie complète 1885 à nos jours, Éditions de la Courtille, p. 579 : « la première voiture 6 cyl. fabriquée dans le monde »
- Dominique Otello, Les premiers moteurs d’aviation [PDF], sur aviation-fr.info
Bibliographie[modifier | modifier le code]
- (de) Rudolf Diesel, Die Entstehung des Dieselmotors. Erstmaliges Faksimile der Erstausgabe von 1913 mit einer technik-historischen Einführung, Steiger Verlag, Moers, 1984 (ISBN 3-9215-6470-0).
- (de) Max J. Rauck, 50 Jahre Dieselmotor: zur Sonderschau im Deutschen Museum, Leibniz-Verlag, Munich, 1949 (ASIN B0000BMMSD).
- (en) Arnold E. Biermann et Hermann H. Ellerbrock Jr., The design of fins for air-cooled cylinders [PDF], NACA Report no 726, 1939.
- (en) Takashi Suzuki, The Romance of Engines, SAE, 1997.